| 作者 | 主题 |
|---|---|
|
看雪001 至圣 
经验值:20446 发帖数:2194 精华帖:79 |
楼主
主题:位置控制模式下的力矩限幅有哪些应用场景 
位置控制模式下的力矩限制,大家有做过吗? 它是一个不常用但又非常实用的方法,相信懂得它的应用的人不多。
大道至简,知易行难
|
|
看雪001 至圣 经验值:20446 发帖数:2194 精华帖:79 |
4楼
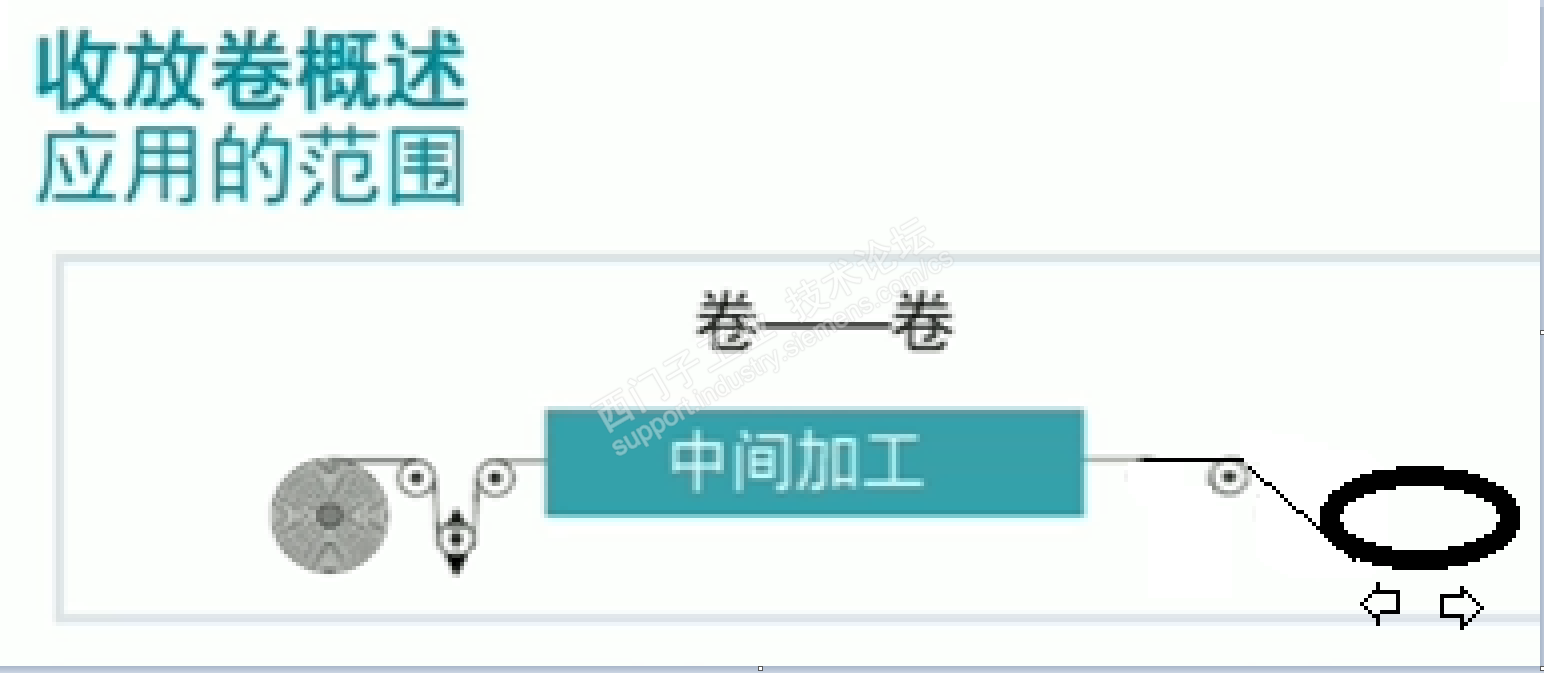
主题:回复:位置控制模式下的力矩限幅有哪些应用场景再说说这个不倒翁的应用: 最近做完一个收放卷的项目,放卷是圆形,收卷是椭圆形
我将竖直方向的浮动辊改为水平方向浮动,并且和收卷机构做成一体,也就是收卷机构是水平方向左右摆动的(像个不倒翁吧),以便对卷绕过程中的张力波动进行缓冲抵消。 速度模式下的力矩控制能不能达到这个效果呢?也可以,但没这个方便。
大道至简,知易行难
|
|
sunzengli 侠士 经验值:1722 发帖数:200 精华帖:1 |
9楼
主题:回复:位置控制模式下的力矩限幅有哪些应用场景日本人做的印刷设备,为了控制印刷工作台的平稳性,伺服是速度模式,因为印刷面大小的不同,工作台行程末端的位置要经常调整,用一颗螺丝调整位置,操作工调整螺丝顶住工作台,作为行程末端。当力矩达到设定的范围,工作台停止。如果放一颗传感器,经常调整肯定容易损坏,这是一个由操作工简单操作位置的不错的方法。 去年做过的一个项目,也是收放卷,当设备刚装好物料时,薄膜是松弛的,这时候需要手动把卷收紧,收的过紧会损坏物料,收的太松则不利于下一步操作,收卷采用速度模式,利用设定的力矩限制来控制收卷的松紧。当然了,自动过程要用力矩模式,通过PID运算达到恒张力的目的。 |
|
看雪001 至圣 经验值:20446 发帖数:2194 精华帖:79 |
14楼
主题:回复:位置控制模式下的力矩限幅有哪些应用场景我再举几个位置模式下的力矩限幅的应用吧: 传统的回零方式是正向或反向碰撞到硬极限开关,然后返回找近原点信号,再用编码器z相信号置零,它一共需要接3个信号(正负硬极限开关,近原点开关,z相信号都不算在内)。但现在伺服总线应用已经很普遍了,可以通过总线读取编码器位置、速度和电机转矩,总线伺服的回零方式完全是可以不使用这3个外接信号,位置控制模式机械回零下直接将负极限转矩由-300%设为10%,伺服电机撞到机械挡块,记录此时编码器位置,直接将此位置设为参考点。
大道至简,知易行难
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城













 短信登录
短信登录
