硬件连接:
主轴精确定向需要高精度的感应式接近开关,主轴定位的精度主要取决于接近开关的精度和安装 是否得当。
当金属体与接近开关接近时,接近开关产生上升沿信号(电平+24VDC)。
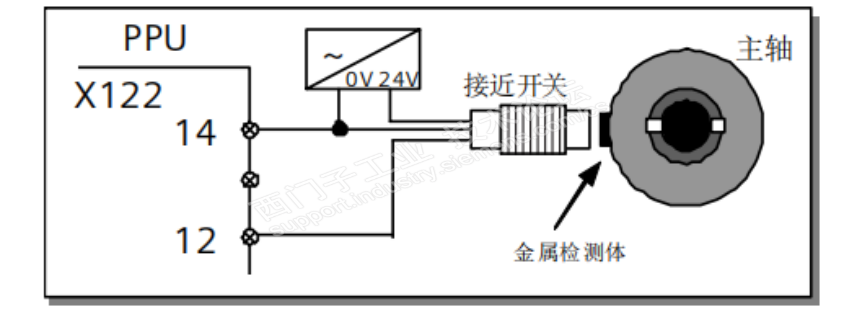
BERO 信号接到 PPU 的 X 122 的 12 针脚,14 针脚接接近开关的信号地,8 针脚需要接+24V。
相关参数:
34200 ENC_REFP_MODE 7 接近开关作为主轴定向信号;
34040 REFP_VELO_SEARCH_MARKER 实际值 主轴找回零信号的速度(单位:转/分);
34060 REFP_MAX_MARKER_DIST 720(2 圈) 搜索回零信号的距离(单位:度);
35300 SPOS_POSCTRL_VELO 实际值 主轴位控速度;
35350 SPOS_POSITIONING_DIR 3/4 主轴定向方向(3-正/4-负);
实现步骤:
编辑 PLC 应用程序,在应用程序中(每个周期都可扫描)加入DB3930.DBX1.5取反输出DB3803.DBX2001.4逻辑关系:目的:每次从速度控制方式转到定位方式,执行一次重新同步(找主轴零度位置);
将修改过的 PLC 应用程序下载到 828D 中,然后启动;
修改驱动数据;
设定参数 P495[0]=2,然后保存复位即可;P0495[0]:表示电机编码器;P0495[1]:表示第二编码器;P0495[0]=2 表示 BERO 信号连接到 X122.12 管脚。 在执行 SPOS 命令时,主轴由静止启动,加速到 MD34040 定义的速度,寻找回零信号;找 到回零信号以后,以 MD35300 定义的速度定位。主轴旋转方向由机床数据 MD35350 确定.









 技术支持
技术支持
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
