Temp不能跨扫描周期,也就是不能实现数据的连续轮转。
所以temp在一个扫描周期中的使用先后次序就很重要。这是一种耦合,由底层机制带来的用法上的耦合和限制。
随着一个FB或FC内部的结构越来越复杂,其内部会分成多个子模块。
如果一个Temp的使用范围超出一个子模块,在多个子模块中存在,那么这些子模块的组织顺序,就在某种意义上被锁定了,不能前后随意拖拽窜动。Static就没有这个问题。
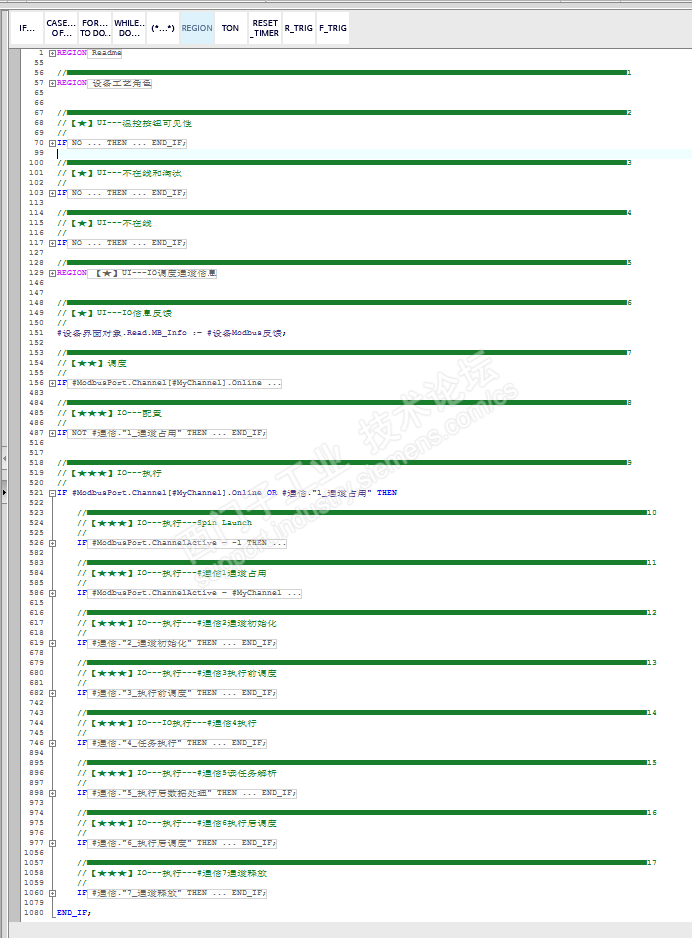
例如:我先前开源的Modbus案例源码,其内部由17个子模块构成。这些子模块的位置组织和摆放,可以随意前后挪动,都不会有问题,唯独有一个子模块例外。
时间久了就不记得先前的程序细节。一查看才发现,其中用了Temp变量,就出现了上述的问题。
开销、便利与代价,相互之间是平衡的,就看自己想要什么。事物在时间中会变得复杂,贯彻一个原则并不容易。
为什么前后可以自由窜动很重要呢?是因为想要一个解耦的架构。
这样子模块可以随意修改扩展,而不会影响其它的。这样的子模块可以被称为一个层,也就是一个功能子集,其中的元素可以自由增删。
非常复杂的FB内部调度机制和结构设计,最后就会走到这一步。
那为什么不用很多独立封装的FB或FC嵌套组合而成一个大FB呢?因为我喜欢扁平化设计。
一个解耦的层,与一个独立的FB或FC在逻辑本质上是等价的,但开销更低,可以明显降低架构的复杂度,提高清晰度。这方面的实践效果对比都验证了这一点。
另外,用FB或FC组合出更大FB的想法,乍看是有道理。但当问题变得极度复杂和需求动态化后,这些组件FB或FC的处理会变得更复杂,接口需要不断调整和缠绕。
这时候你有可能会意识到一件事:先前你认为一个独立的局部,可以独立封装成一个FB和FC的。但在更复杂的局面下,这些独立FB和FC之间其实是更应该耦合的。而你先前的做法,只是因为当时的局面简单,就认为它们永远会彼此无关,就把这些局部元素解耦分开了,而其实这些元素在更复杂的局面下,本应就是内聚在一起的。









 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
