西家传动不论是过去还是现在,它都有一个功能,就是负载观测的惯性补偿与摩擦特性曲线功能。不过这个功能在传动应用中,并不是刚需。很多场合可以不强调对它的使用。但是针对惯性负载,包括电机输出轴有齿轮箱等机械旋转部件,采用这个功能,调整得当,将会提高传动系统的动态性能和质量。
举个例子,一个对拖测试台的测功机的传动系,加入了负载惯性检测与系统摩擦特性补偿后,可以实现传动系在动态过程,实际转速沿着设定转速的轨迹运行,不会超调。也不会震荡。如下图示。
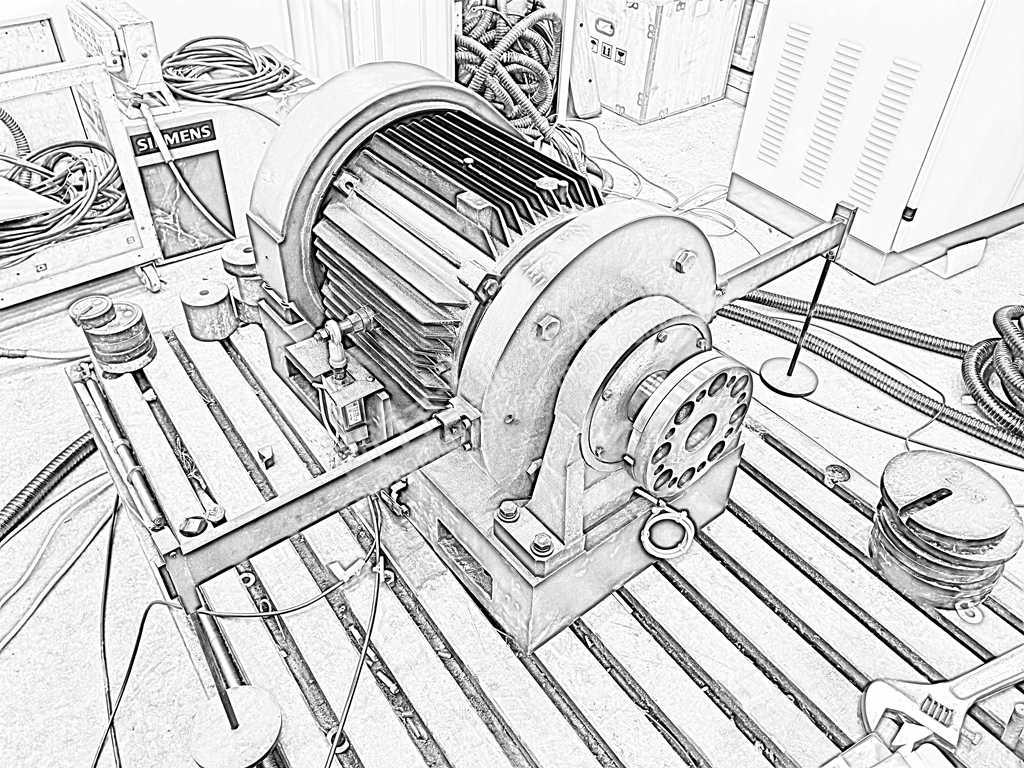
测功机的驱动电机
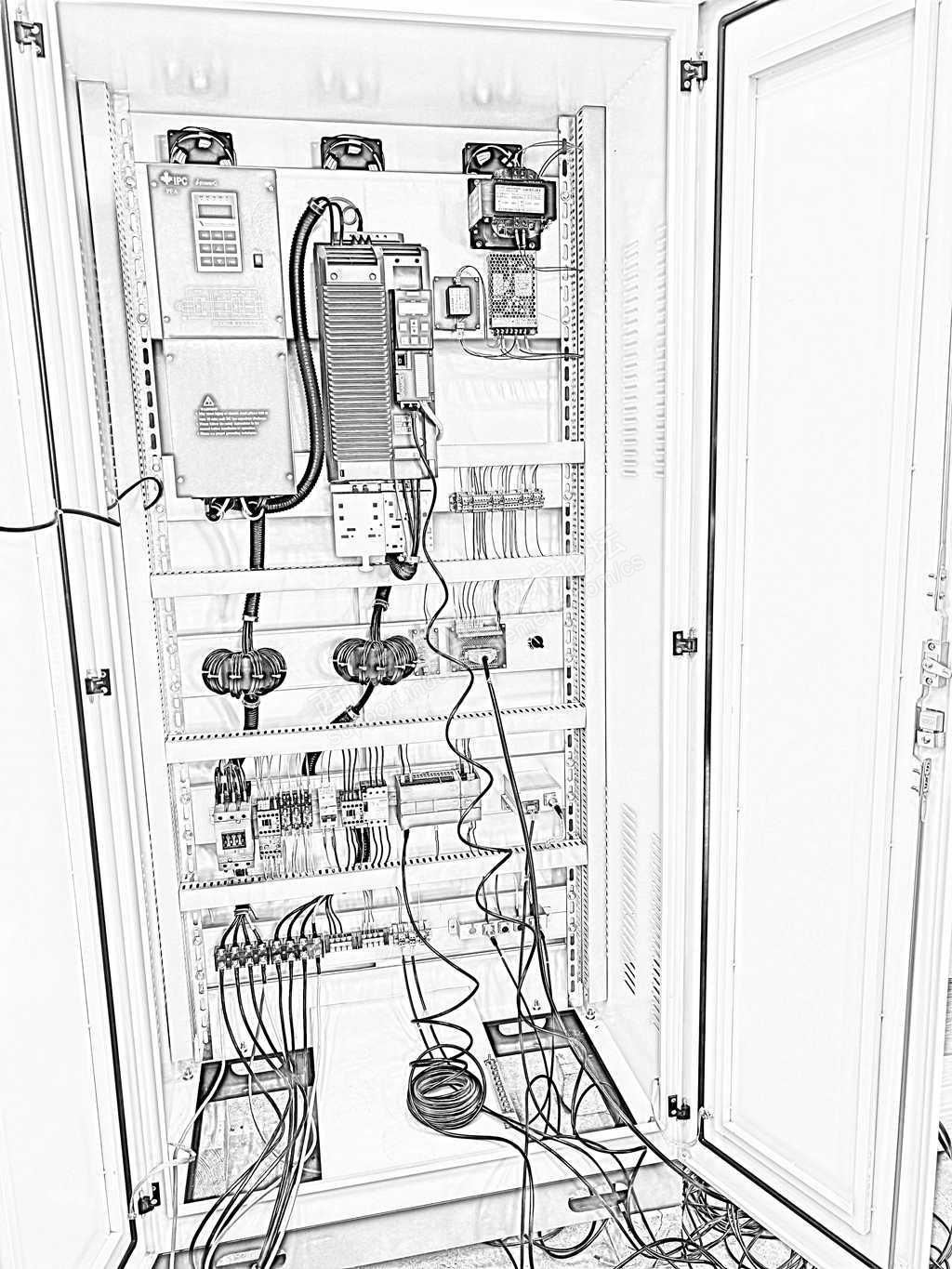
控制柜。采用G120作为电机的驱动控制
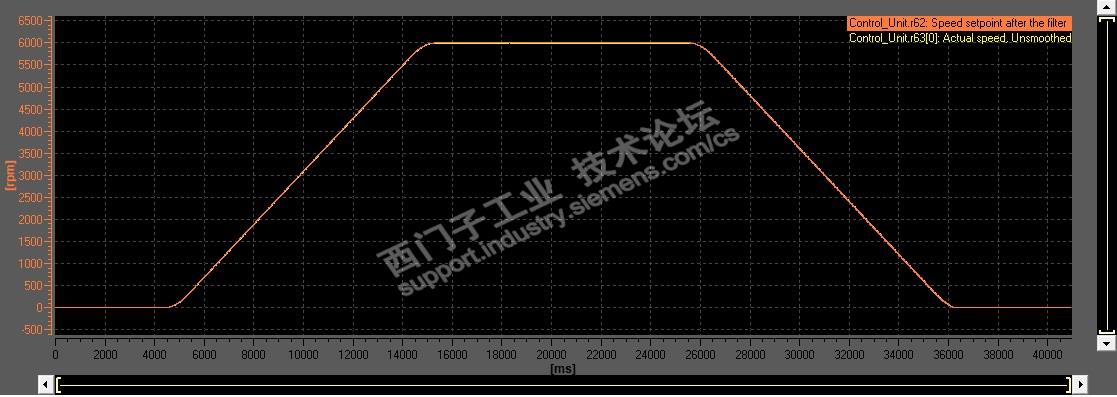
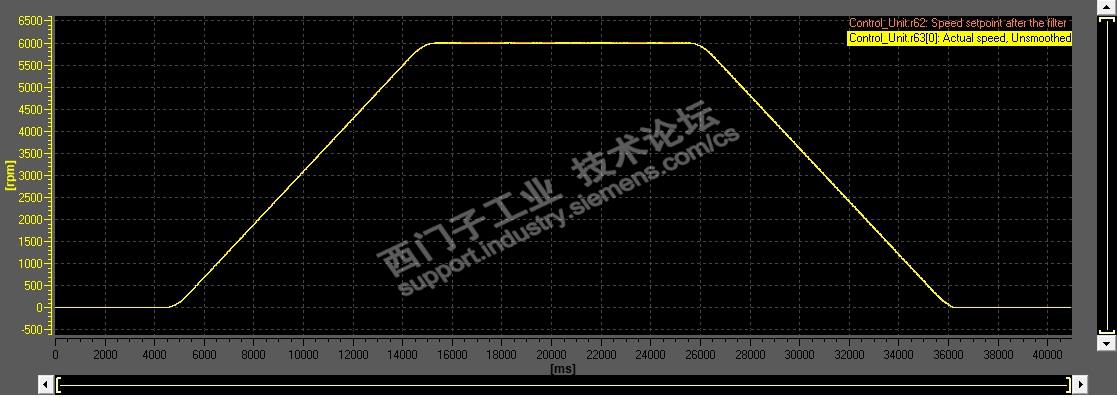
这是在默认加减速斜坡时间10s,加1s圆弧基础上,电机从0-6000rpm的运行曲线。可以看出r62_转速设定值与r63_转速实际值在整个运行过程中的曲线完全重合。这就是加入了系统摩擦特性曲线和激活了负载惯性观测器补偿后的运行控制效果。用完美表现来形容,不足为过。
话题还是从20多年以前,使用西家传动直流控制器6RA70说起。一开始,在应用6RA70时,通过动态自动优化辨识以后,调节器的参数直接应用,转速突加给定后,实际值会出现在结束加速后,系统会有震荡收敛的过程。也就是先超调,后震荡、收敛,才能进入稳态。但是,看到6RA70手册里的调试项目,有一个P51 = 27/28,是针对系统惯性摩擦补偿的识别和测试,然后激活即可应用。我们试了一下,发现其效果很不错。突加转速设定值后,转速实际值没有超调,而是斜坡加速结束后,直接进入了设定值稳态运行。以后,这个功能就被我们作为必选项,列入了调试流程。并激活它。
6RA70的摩擦惯性补偿功能图
后来,公司的测功机产品改成了交流驱动系统,我们在6SE70里也能看到摩擦惯性与惯性补偿功能。继续使用,效果类似直流系统。很爽。
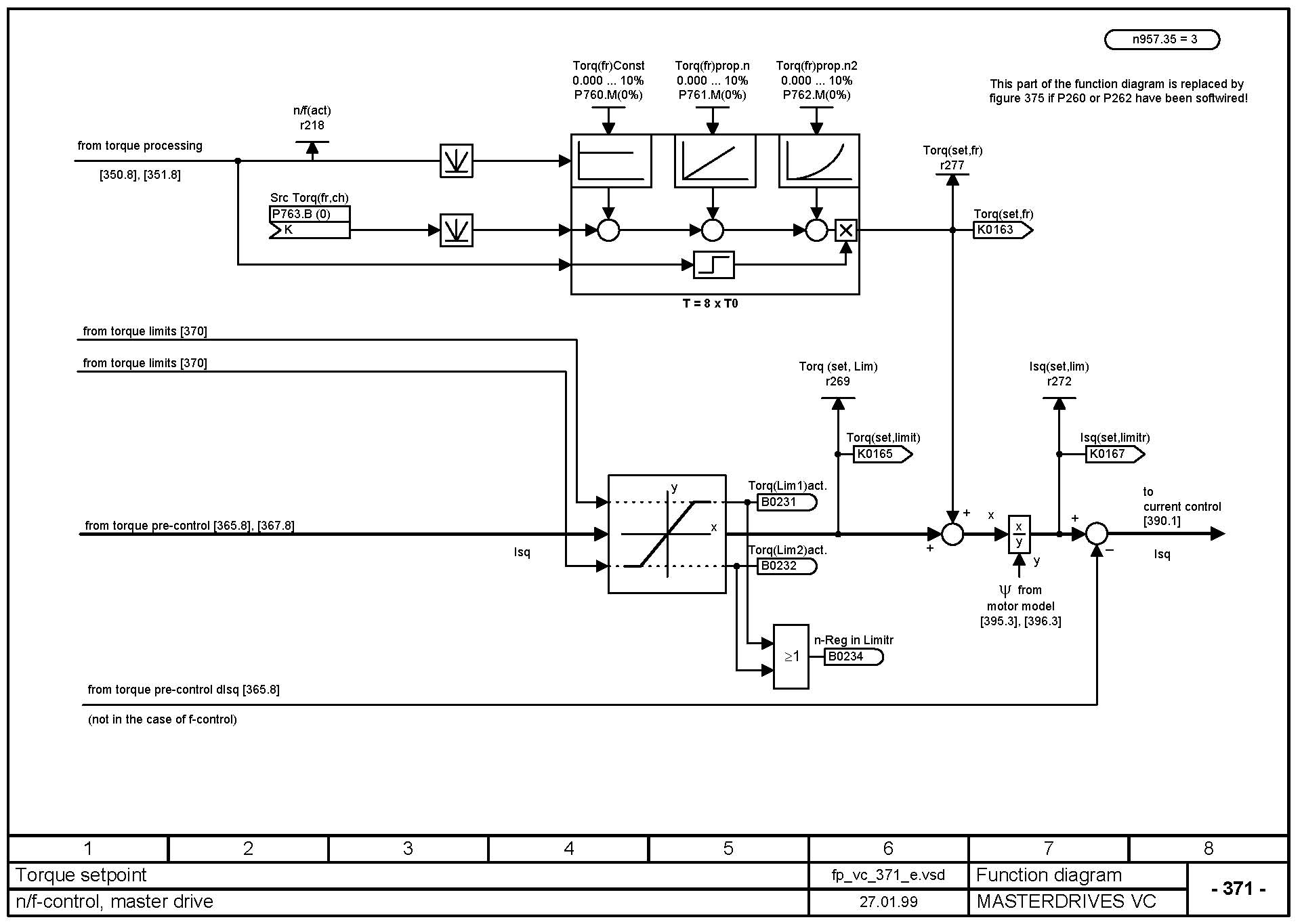
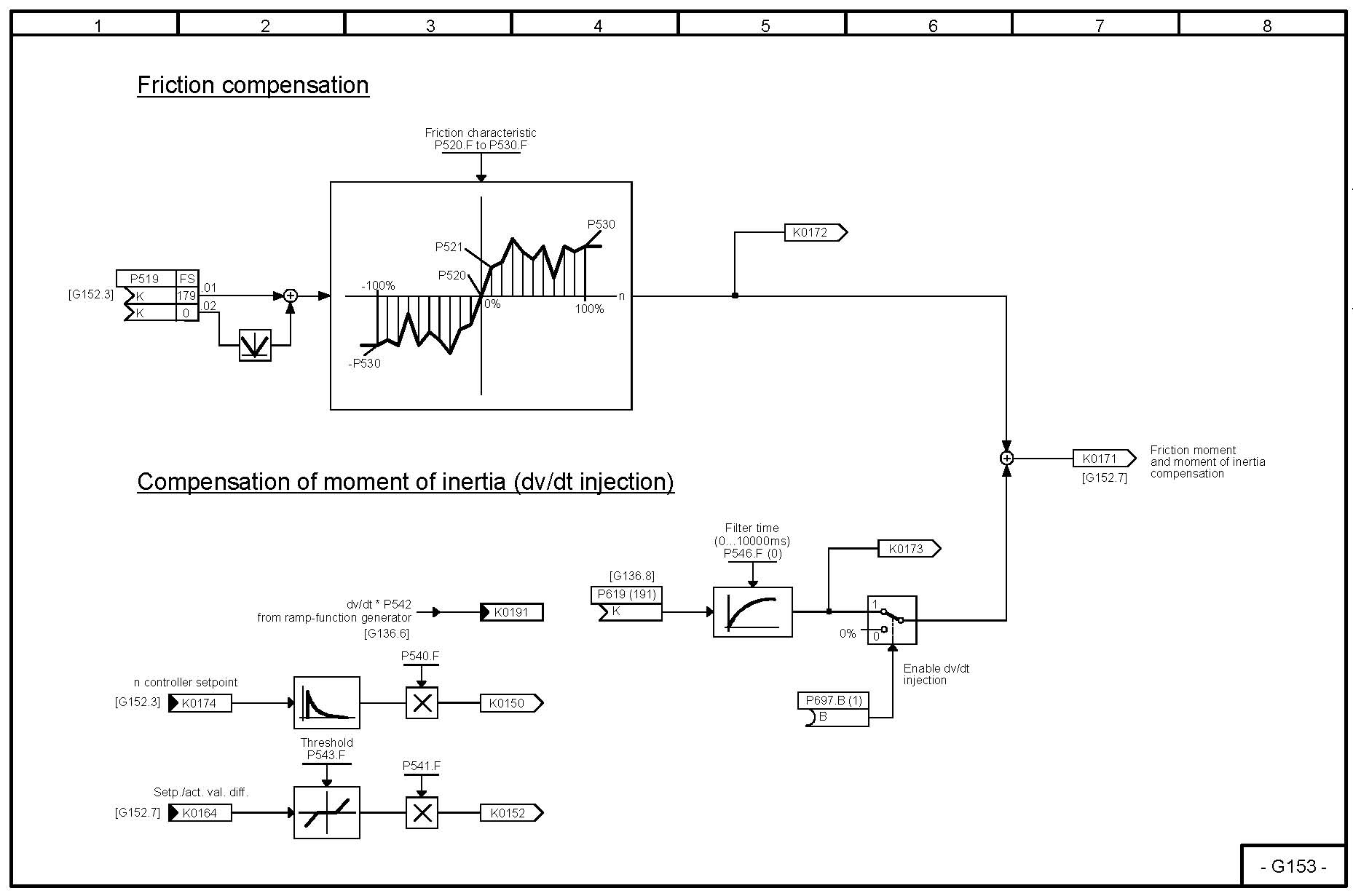
这是6SE70的摩擦特性与补偿功能图,它是和惯性补偿分开描述的,这里从略。
到了MM440时代的应用,我只注意到了MM440具有惯性观测器和惯性补偿的功能,但摩擦特性曲线的功能却不见了。而且,最关键的是MM440的惯性补偿,它需要人为手动去设置,而不是自动检测识别。由于经验不足,所以这个惯性补偿的功能始终被关闭不用(P1496 = 0)。说的直白一点,是不会手动设置的应用。所以放弃了。
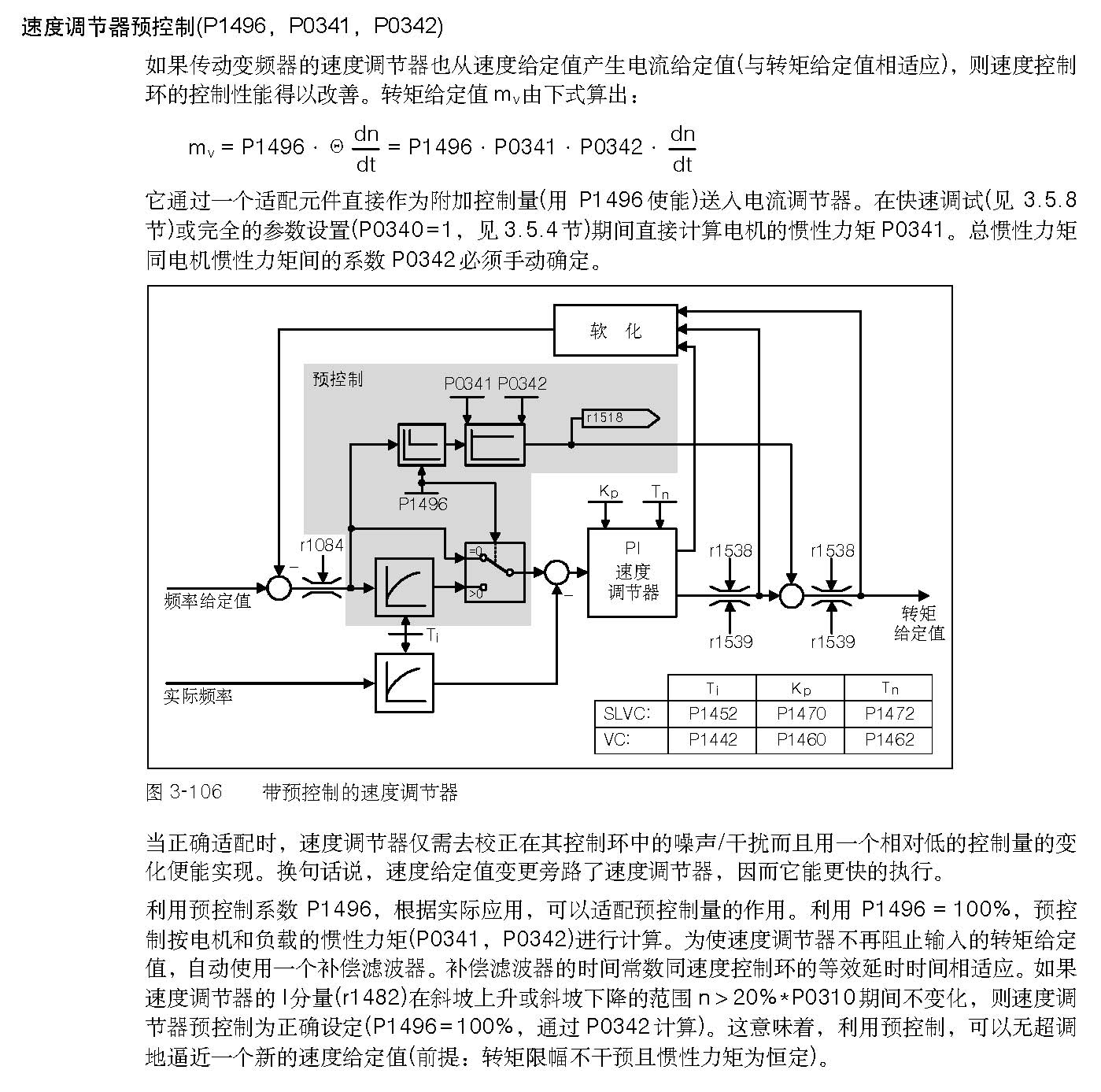
这是MM440对摩擦惯性补偿功能应用的官方发布描述。
现在,是G120时代的应用。如果从2010年以后算,我们用G120也有14年左右的历史了。但是由于有了MM440的应用过程,一开始用G120,我没有过多的关注惯性观测器与摩擦特性补偿这一块的信息。一直是按照MM440延续的方法调试。只是2020年以后的近几年,我们把G120的惯性补偿应用上了,但摩擦特性曲线因为是与惯性检测补偿分开描述的,所以一直没有发现,直到现在,才因为一个偶然的机会,在G120的操作手册里发现。拿来一用,哇塞,找到了当年6RA70和6SE70时代的那种调试感觉。激活了G120的惯性补偿与摩擦特性曲线以后,加减速过程变的特别的丝滑。帅呆了。
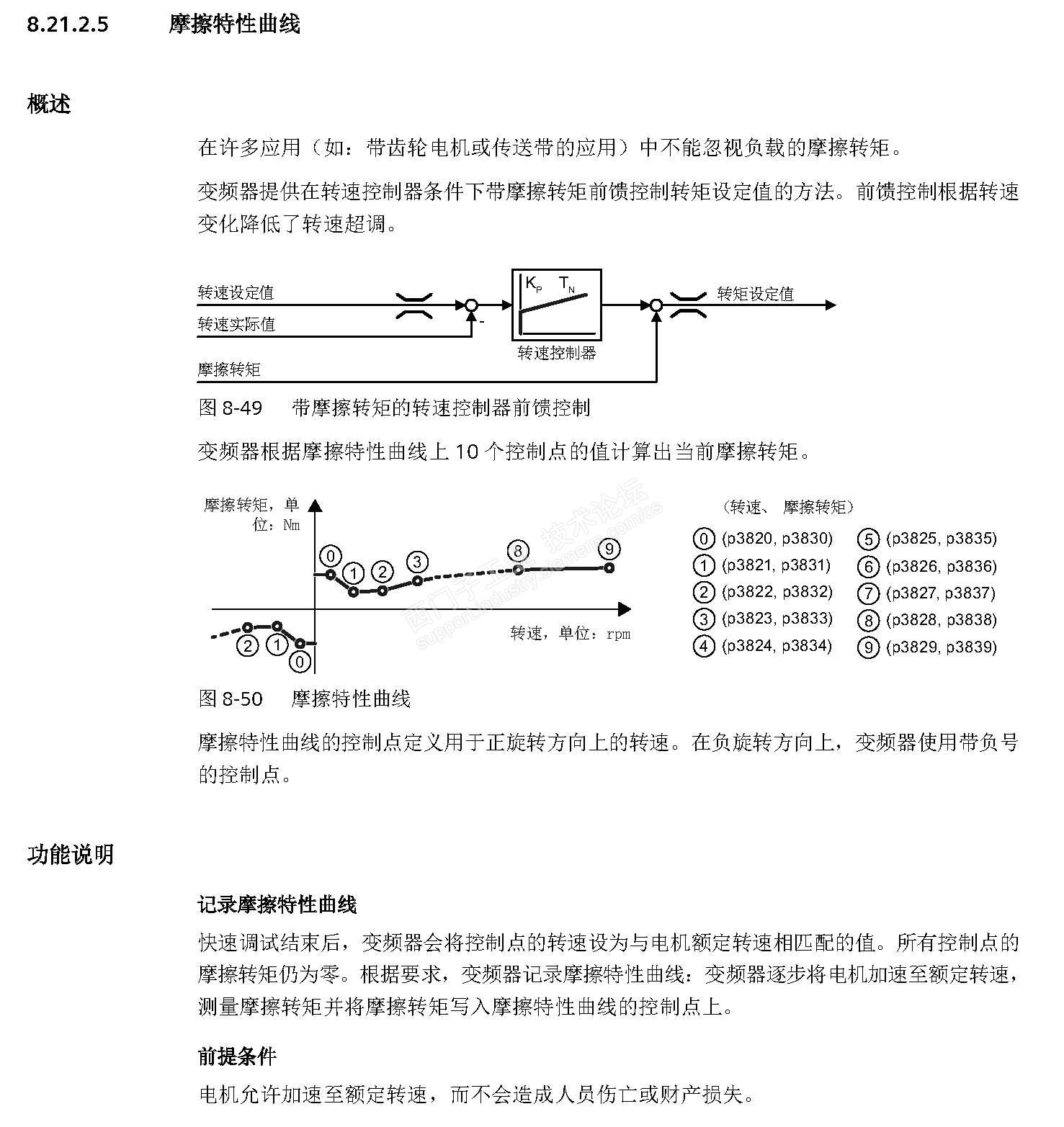
有关惯性补偿这里从略,仅把摩擦特性曲线的说明展示。









 技术支持
技术支持
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
