200smart的PID指令已经过于繁杂了,而打开博途库PID_Compact V2的说明就更加臃肿复杂,Compact不仅是增加了更多的接口,甚至连核心的PID算法都改造了,增加了所谓PD权重,拉普拉斯运算符;核心算法的改造导致了接口增多,模式切换的沿信号让用户无法适从……
1,PID算法原理
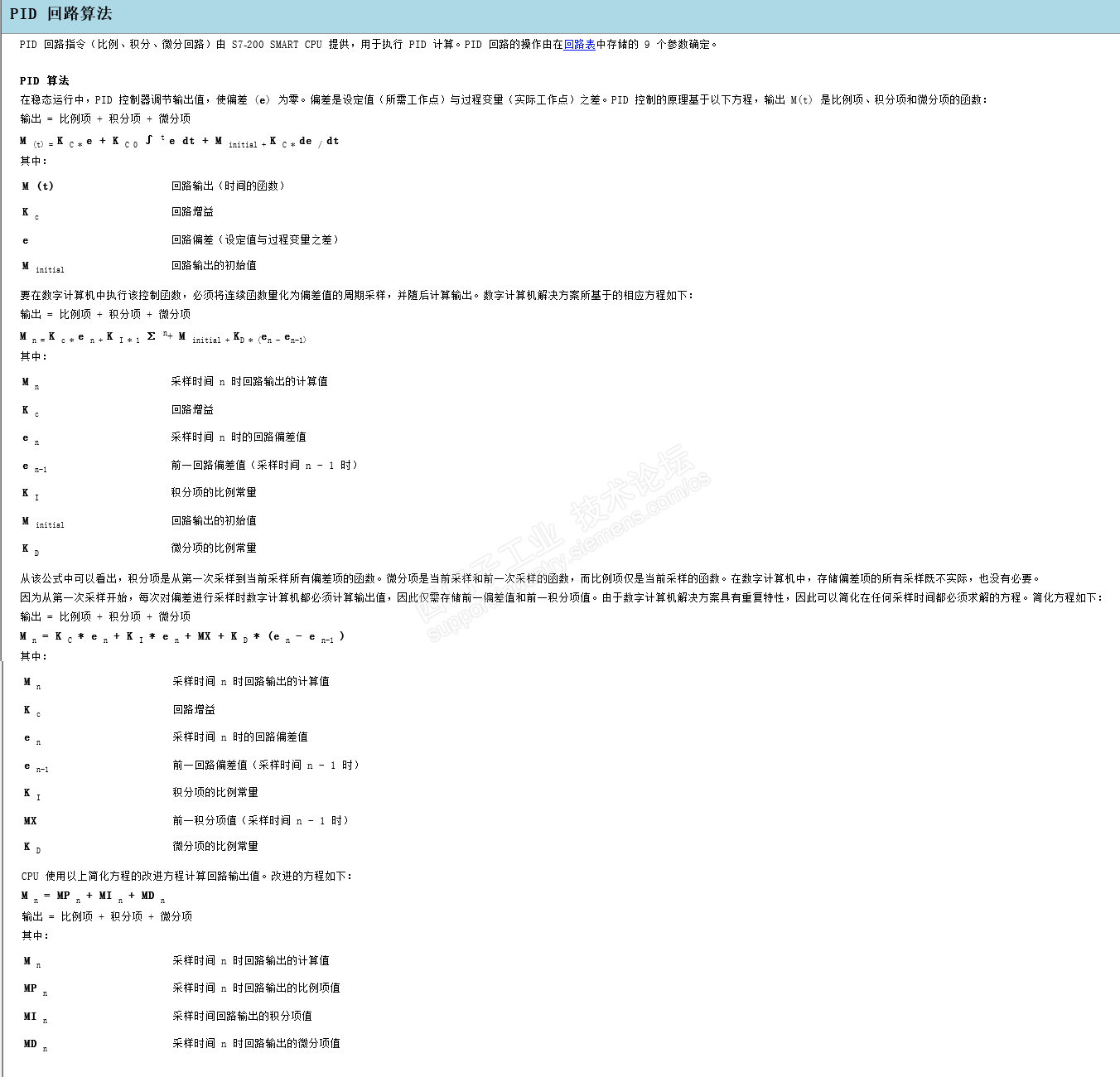
上面这段是对经典PID算法的分解,得到简化计算后的“三项式”
M n = MP n + MI n +
MD n
输出 = 比例项 + 积分项 + 微分项
下面分别对单项式展开:

比例项的展开,没问题,已经足够简化。(比例项与后面的积分项是存在关联的)
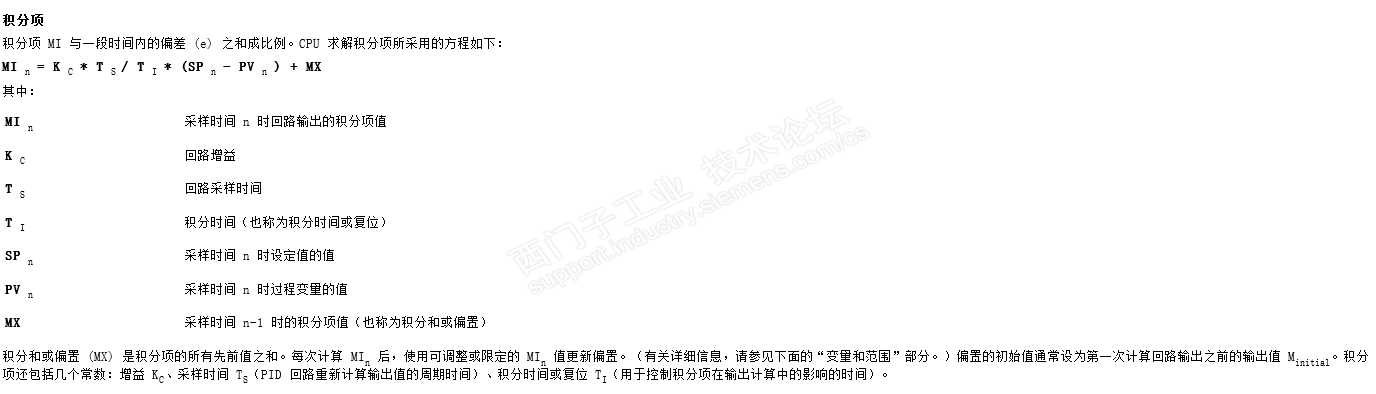
积分项的展开,仍然是可以化简计算的
MI n = K C * T S /
T I * (SP n - PV n ) +
MX
MI n = K C * (SP n - PV n )*T S /
T I +
MX
MI n = MPn*T S / T I + MX
这一步看懂它,程序就可以写的很简单!
实际上,大多数的PID调节都只需要PI,D项为0,即PID算法
输出 = 比例项 + 积分项









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
