西门子412-2DP与ABB机器人的硬件组态步骤
接上一篇412-2DP的组态过程,现单独将主站412-2DP与ABB机器人的PROFIBUS DP通讯拿出来详细说说,毕竟,目前设备上各种类型的机器人应用也非常广泛了,之前,在论坛上看到有用PROFINET200smart组态的帖子,我用profibus DP方式来充实应用领域内容。
组态profibus DP通讯的几个要点:
1) 安装西门子或第三方GSD文件;
2) 编辑主站信息,激活主站通讯链路(类似铁路图标),定义通讯频率;
3) 编辑从站信息:从站地址、频率、通讯数据偏移量;
安装ABB机器人的GSD文件,我在STEP7 V5.4(V5.5)版本上测试均可以安装应用的,图示:
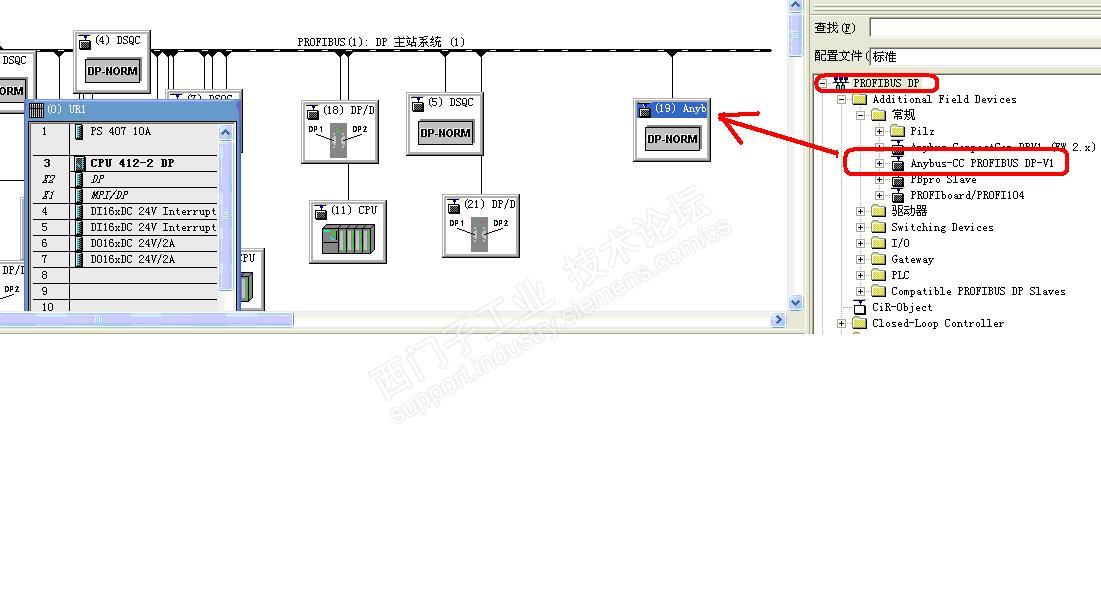
在硬件组态界面中,将事先安装有ABB的GSD硬件拖拽到编辑区,并定义从站地址及通讯频率等主要参数。
其次,点击从站图标,在槽号位置右键点击,弹出窗口选择“插入对象”,在弹出的小窗口中选择“Anybus –cc….”选项,再次选择需要的通讯数据input和output数据数量,如4个字的输入和输出,图示:

双击槽号,可以根据具体双方约定的地址修改通讯数据交换区地址。
编译,保存项目,下载到具体的cpu,这个硬件组态项目STEP7侧就可以了,具体通讯程序是根据双方控制要求及硬件组态地址区编辑进行的,这里省略了。
由于实际应用中通讯数据量比较少,一般应用于各从站之间的逻辑控制上的“位”信息传递,所以,没有调用SFC14和SFC15,从站通过主站为主站、各从站之间进行多方数据,均在主站的通讯逻辑控制中进行数据传递。
机器人侧,编辑profibus DP项目可以有2种方法。即通过ABB机器人DP通讯模块下的16点输入、16点输出硬件进行,也可以是通过通讯数据交换区指定的地址软件内容进行。
启动机器人电源,在示教器上的“控制面板”中设置进行。
步骤:
1) 选择控制面板;

2) 配置系统参数;

3) PROFIBUS设置;

4) 设置通讯数据数量;

5) 点击 Industrial Network选项;


6) 设置PROFIBUS通讯地址;

7) 重新启动生效通讯参数设置。
西门子STEP7与ABB的profibus DP地址对应关系,是STEP7的DP通讯首地址,如输入的首地址对应于ABB的DP通讯第一个数据(ABB侧以首地址1开始,而西门子仍然是以,如输入I??.0地址应对)这个的通讯数据交换区域地址对应的关键,输出仍然是与输入一致应对。
编辑机器人坐标及动作程序,联机就可以调试了。上述是ABB机器人与西门子400PLC以profibus DP通讯方式进行数据交换的过程。
因为我拍的ABB示教器照片比较模糊,ABB的组态过程截取文档,里面的参数与我实际应用不同,望见谅。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
