200SMARTV2.4固件推出后,想必大家都想连接下V90PN进行测试,手头上这两样都有 ,所有就抓紧测试了下,现在分享给大家。

1.参数设置组态!
1.1 S7-200SMART固件升级
要以下几个条件满足才能通过PROFINET网络对V90进行编程调试:
① S-200SMART CPU固件V2.4
② V90伺服驱动器和电机已准备就绪(V90EPOS模式)
③ V90驱动器和S7-200SMARTCPU已连接到PROFINET网络
其中S7-200SMART是2017年的V2.1固件版本,所以用普通MicroSD卡(不超过16G)进行了升级,如果是V2.3固件版本可以直接用编程软件升级。升级后可以在菜单栏“PLC>PLC信息”里看到升级完的CPU固件信息,如图1所示,V2.4固件的CPU就具备了PROFINET IO控制器的功能。

图1:CPU固件升级
1.2 V90PN伺服参数设置
因为只是测试再加上我电脑USB一直连不上V-ASSISANT软件,所以直接用博途软件配合BOP面板进行设置,其实只要用博途在线分配下IP地址和设备名称就行。确保P29003要是1(EPOS模式),P0922那就是111报文就行了,因为因为后面编程指令库SINA_POS仅支持111报文。下面说下分配IP地址和设备名称:
打开博途软件,菜单栏“可访问的设备”直接找到S7-200SMART和V90PN伺服,如图2所示:

图2:搜索“可访问的设备”
左侧“V90PN>在线和诊断>功能>分配IP地址/分配PROFINET设备名称”即可进行你想要的IP地址和设备名称分配,如图3和4所示:

图3:分配IP地址

图4:分配设备名称
1.3 GSDML方式将V90添加到PROFINET网络中
STEP-7-MicroWIN-SMART中组态PROFINET网络是通过PROFINET向导完成的,而前提就是已为PROFIENT设备导入GSDML文件。下载V90PN的GSD文件,https://support.industry.siemens.com/cs/us/en/view/109737269
按以下步骤导入即可。
(1)将下载的GSD文件存放到一文件夹,找到GSDML在菜单位置,如图5所示:
(2)打开STEP-7-MicroWIN-SMART软件,菜单栏“文件>GSMDL文件管理”,导入GSD文件,如图6所示:

图5:打开GSDML

图6:导入GSDML
1.4 PROFINET向导
PNIO设备添加后就可以通过PROFINET向导来一步步完成网络组态。
首先将PLC角色设为“PROFINET IO控制器”,如图7所示,如果之前未导入任何PN设备的GSD文件,向导是无法进入下一步的。
在网络中分别设置控制器的IP地址以及IO设备的IP地址和设备名称,IO设备的设置必须与之前V90PN的设置一致,如图8所示。
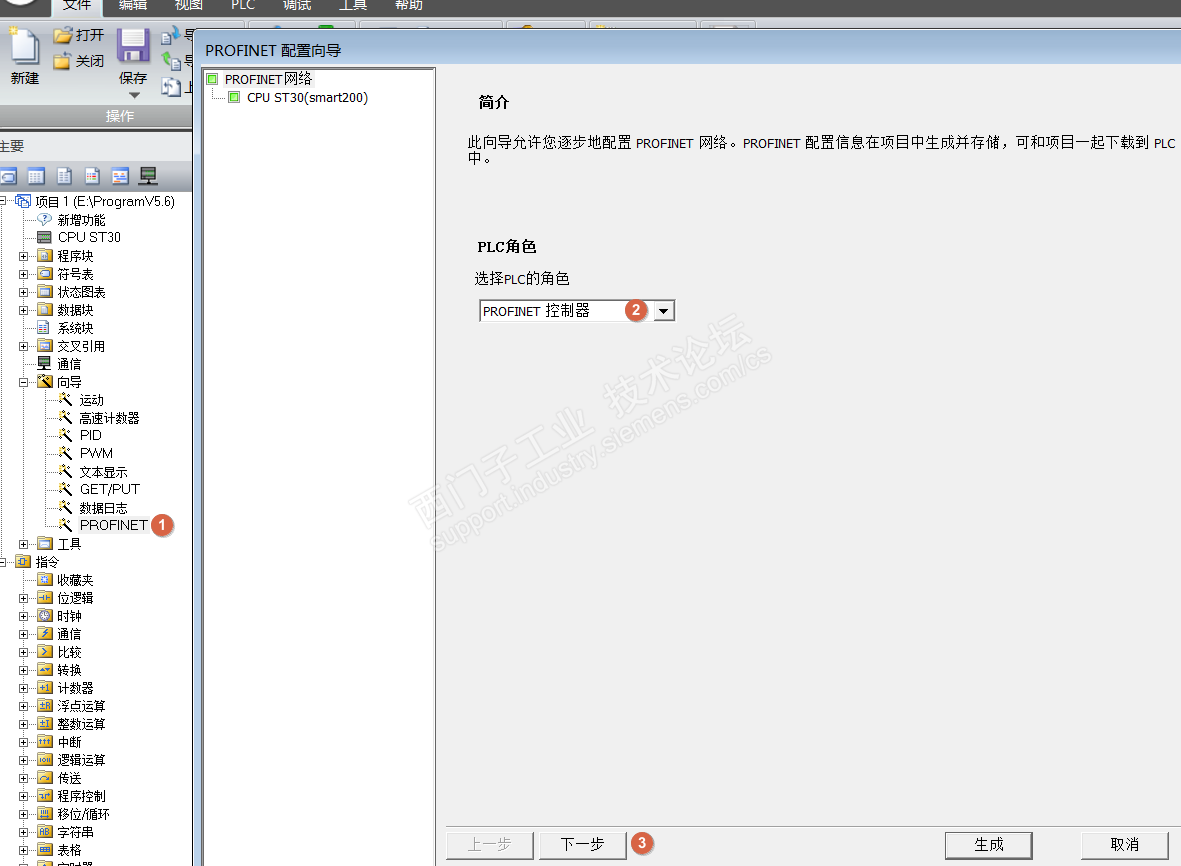
图7:开始PROFINET向导

图8:配置IO设备的IP地址和设备名称
2.编程和调试
下面将采用“SINA_POS”指令对V90PN进行定位控制。SINA_POS指令调用目录是“指令>库>SIMATICS_control(V1.0)”,调用过程中会提示库存储器分配按建议地址即可。指令调用如图9所示,主要就是I/QB的地址与向导组态一致即可,同时建立一些变量方便调试,如图10所示。

图9:SINA_POS指令示意

图10:变量表
2.1 “SINA_POS”指令库说明
具体参见系统手册,几个大家要关注的方面:
一共8种运动模式,它们都有一些共性的前提条件:
(1)将输入操作数“CancelTraversing”设置为 1。
(2)将输入操作数“Intermediatestop”设置为 1。
(3)在 Control_table 中,根据十进制系统将“ConfigEpos”设置为 3。
(4)跟FB284一样也有OverV、OverAcc、OverDec三个速度倍率参数,为了方便调试,程序将它们都设为100,同时将“ConfigEpos”常赋值3,如图11所示:
注意OverV、OverAcc、OverDec、ConfigEpos四个参数是在Control_table指向的连续四个数据,如图12所示:

11:固定速度倍率和config_Epos

12:倍率及configEpos地址
2.2 相对运动
相对运动的运行条件及赋值使能步骤:
①“CancelTraversing”设置为 1;
②“Intermediatestop”设置为 1;
③“ConfigEpos”设置为 3;
④“ModePos”模式值设为1;
⑤ 使能轴;
⑥ 设定运行速度和运行距离;
⑦ 启动轴运动;
相对运动测试实时运行如图13所示:

图13:相对运动运行测试
2.3 点动
需要注意点动的两个触发指令(正向/反向)需要用到Control_table里的两个控制位,也就是我们变量里的V8000.2和V8000.3,另外点动的速度是由V90驱动器里设置,PLC只能控制速度倍率,如图14所示:
点动的运行条件及赋值使能步骤:
①“CancelTraversing”设置为 1;
②“Intermediatestop”设置为 1;
③“ConfigEpos”设置为 3;
④“ModePos”模式值设为7;
⑤ 使能轴;
⑥ 正向/方向点动使能;
点动测试实时运行如图15所示:

图14:点动控制位

图15:点动运行测试
2.4 设置参考点
为了演示绝对运动,必须设置参考点。因为无实际设备,不方便通过主动回原实现(当前可以模拟限位开关的),所以选择直接设置参考点方式回原点。
直接设置参考点的运行条件及赋值使能步骤:
①“CancelTraversing”设置为 1;
②“Intermediatestop”设置为 1;
③“ConfigEpos”设置为 3;
④“ModePos”模式值设为7;
⑤ 使能轴;
⑥ 启动轴运动;
⑦ 收到的“轴已回原点”反馈;
直接设置参考点实时运行如图16所示

图16:设置参考点运行测试
2.5 绝对运动
绝对运动的运行条件及赋值使能步骤:
①“CancelTraversing”设置为 1;
②“Intermediatestop”设置为 1;
③“ConfigEpos”设置为 3;
④“ModePos”模式值设为2;
⑤ 使能轴;
⑥ 设置位置和速度;
⑦ 轴已经回到原点;
⑧ 启动轴运动;
绝对运动实时运行如图17所示:

图17:绝对运动测试
2.6 主动回原点
要说明的是主动回原点的原点开关信号必须接入PLC,然后PLC通过控制字传给V90伺服,也就是变量中的V8011.6。为何是这个位,参考系统手册里的控制字含义,与FB284一样,如图18所示:
主动回原点的运行条件及赋值使能步骤:
①“CancelTraversing”设置为 1;
②“Intermediatestop”设置为 1;
③“ConfigEpos”设置为 3;
④“ModePos”模式值设为4;
⑤ 使能轴;
⑥ 回原点方向;
⑦ 回原点启动;
⑧ 原点开关响应,回原结束;
当然也可以通过启动按钮赋值0直接结束回原,回原实时运行如图19所示。

图18:回原点信号传给伺服

图19:主动回原点测试
2.7 恒速模式
恒速模式的运行条件及赋值使能步骤:
①“CancelTraversing”设置为 1;
②“Intermediatestop”设置为 1;
③“ConfigEpos”设置为 3;
④“ModePos”模式值设为3;
⑤ 使能轴;
⑥ 设定运行速度;
⑦ 选择运行方向;
⑧ 启动轴
如果要停止则将②或③设为0即可。
恒速模式实时运行如图20所示:

图20:恒速运行测试
这样几个模式的运动全部演示完毕,还有伺服报警状态反馈库指令也能读到,这点比FB284强,如图21所示:

图21:读V90伺服驱动器故障信息
总结:跟S7-1500/1200用FB284控制V90伺服套路一致,PLC这种点对点运动控制已经变成傻瓜式编程,向导加运动库搞定,厂家把我们该写的FB也写完了,我们重点就是伺服选型与机械的匹配,解决电机啸叫、反向间隙、系统精度等对现场很重要的问题。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 白金
白金



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
