








 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2015-12-21 09:22:13
11楼
1、 PID程序块在自动控制方式下保持上次手动控制方式控制量的输出?
(1)通过Move指令来更改PID控制器中的P、I值;导致PID控制量保持手动控制量输出;
(2)S7-200 PLC程序如图8所示,在S7-200 PLC程序中,以下指令正常使用,通过HMI设备中的IO域对PID控制器中的P、I参数进行实时更改。
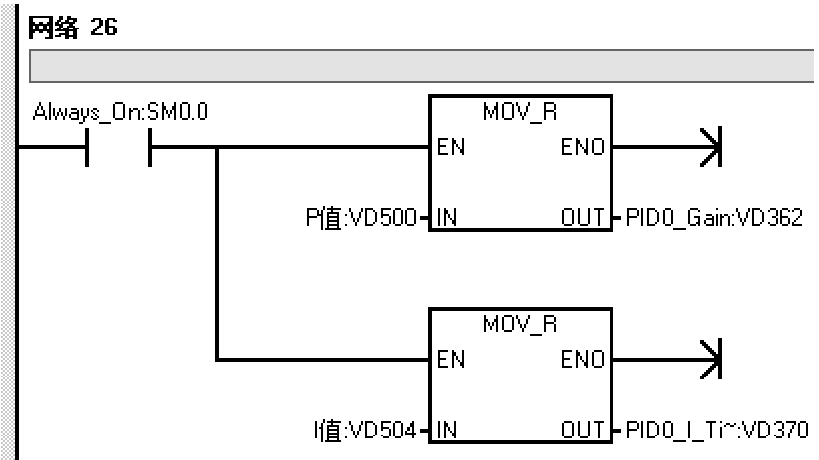
(3)将以上程序移植到S7-200 Smart PLC中,PID程序块在自动控制方式下保持上次手动控制方式控制量的输出;

解决办法:
(1) 删除以上指令;
(2) 将HMI设备中P、I参数的IO域所对应的地址直接设置为PID程序块存储区V区地址中的回路增益和积分时间。
2、在三路PID控制中,PID控制器输出混乱?
(1)其中第二路PID控制回路,在自动状态下,运行一段时间下,PID控制器失灵,控制量输出一直保持27648输出,直至锅炉水温达到最大值报警停止;(2)断电重启后,观察3路PID自动运行,第1路和第3路PID超调温度在3度以内,第2路PID超调10度才能停止控制量输出。
(3)更改PID控制器积分时间由2变为0.05,第1路和第3路PID控制器可以有效降低超调,第2路PID控制器无明显改善。
(4)更改三路PID控制器存储区地址,通过向导按钮建议更改V区地址范围。(Loop0、Loop1、Loop2存储区V区地址都更改)
更改之后,3路PID控制器程序块output输出只能达到18000,无法达到27648,即使更改P值也无法100%输出,更改P值变大后,PID控制器输出从0到65%输出速度变快;
更改积分时间由2变为0.05后,PID控制器输出无变化。
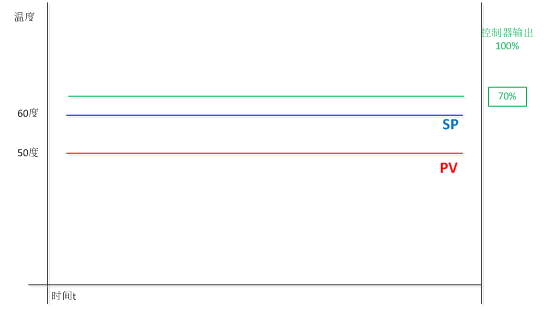
通过更改存储区V区地址范围,PID控制器只有比例作用,无积分作用,并且比例作用也不完全。
更改V区后,手动绘制PID曲线如下图所示。
解决办法:
(1) CPU固件升级为V2.1;
(2) 软件版本升级为STEP 7-MicroWIN SMART V2.1 UP1;
(3) 使用新软件STEP 7-MicroWIN SMART V2.1 UP1,新建项目,用PID向导重新生成PID功能块生成PID功能块。
重新下载程序后,三路PID控制器输出正常。
请填写推广理由:

分享
只看
楼主


















 短信登录
短信登录
