1 概述
西门通用小型伺服控制器V90在自动化领域中得到了广泛的应用,随着客户需求的不断增加以及产品功能的不断完善,最近又推出了V90 PN的新固件。对于全新的固件V1.04版本,做了以下几方面的功能扩展,本文为大家做个详细的介绍。
回零模式新增方向挡块
EPOS模式下通过周期通讯设定参考点坐标值
DI/DO可以自定义连接111报文
支持低惯量的1FL6多圈绝对值电机
2 V90 PN新固件1.04扩展功能
2.1 回零模式新增方向挡块
V90 PN EPOS控制模式下,在主动回零的过程中,当检测到换向开关(硬限位开关)激活时,自动改变寻零方向。
注意:该功能仅针对回零方式为“参考挡块及零脉冲(Reference cam and encoder zero mark)” 和仅编码器零脉冲(Encoder zero mark only)的主动回零方式。
2.1.1 采用111报文时的主动回零换向开关激活
(1)通过设置参数p29239=1或在配置回零参数界面复选框来启用反向开关。
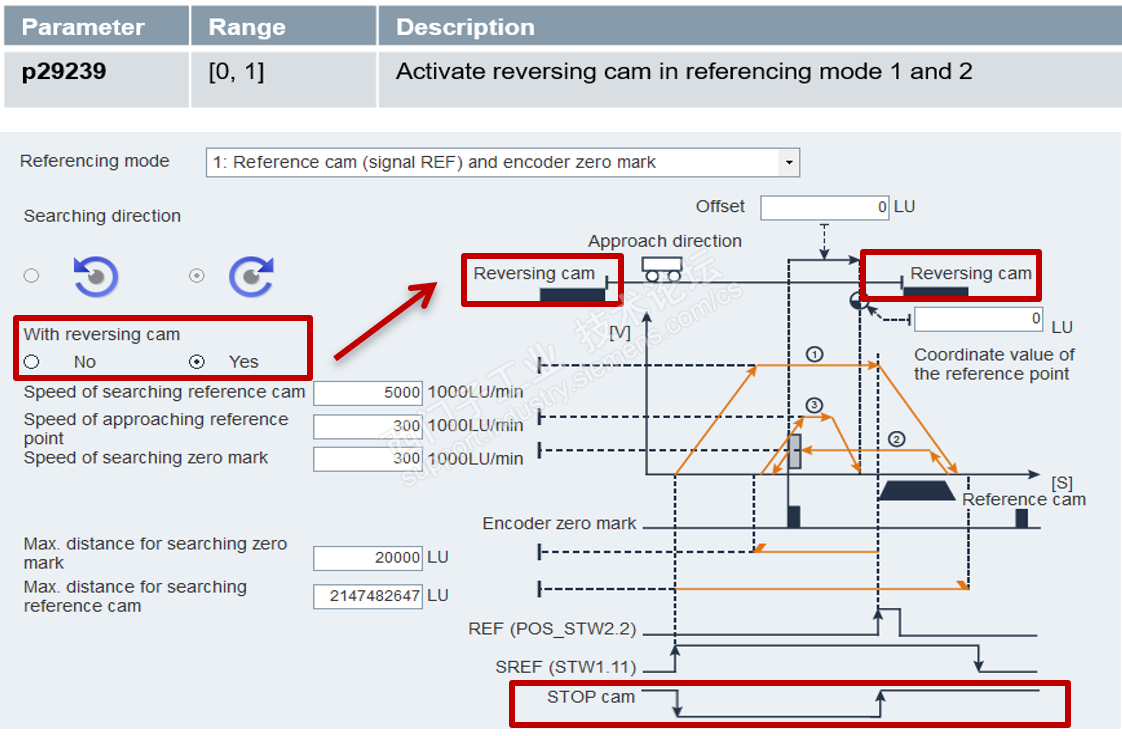
图2-1. 配置回零参数
(2)开始回零之前,需确认硬限位功能已禁用。若已激活该功能,则通过报文控制字POS_STW2.15 (1→0) 禁止硬限位功能。
(3)回零开始后,伺服电机启动,当检测到换向开关信号之后,改变搜索方向执行回
零功能。若未检测到换向开关,则按照参数P2604定义的方向寻找参考点挡块。
当回零完成后,PLC通过报文控制字POS_STW2.15(0→1)再激活硬件限位功能。
(4)伺服电机回零完成之后,数字量输出信号REFOK (ZSW1.11) 将置位为1。
2.1.2 采用7,9,110报文时的主动回零换向开关激活
采用7,9,110报文时的主动回零,不需要通过PLC禁止硬件限位功能,当主动回零触发之后,驱动器自动禁止硬件限位功能,当回零完成后,则重新激活硬件限位能。
2.2 EPOS模式下通过周期性通讯设定参考点坐标值
如果使用标准报文110和111,可以通过自定义的PZD“user2”来实现EPos参考点坐标值的周期通信。具体步骤如下:
(1)在调试软件V-Assistant中,将主报文(P0922)设置为110或111。将扩展报文(P8864)设置为999。

图2-2. SINAMICS V-ASSISTANT报文选择
(2)在调试软件V-Assistant中,将参数P29152设置为1,激活功能PZD“user2”。
(3)在 TIA Portal 的设备组态中,选择主报文110或者111,并添加扩展报文750。
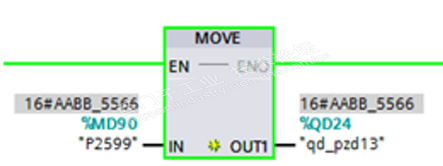
(4)在 TIA Portal中,可以通过Move指令将P2599的值附在750报文自定义的PZD13~14中,发送到驱动器。
2.3 DI/DO可以自定义连接111报文
之前V90 PN 1.03版本,外部触发的数字量输入可以通过“用户自定义发送字”,设置参数P29151=3,由驱动器传输到PLC。
对于1.04版本,作为控制外部组件的数字量输出DO,可以通过“用户自定义接受字”由PLC传送到驱动器。因此驱动器的DO_1(P29330)和DO_2(P29331)引入新的值16(DO_PZD1)和17(DO_PZD2)来表示未定义的数字量输出。
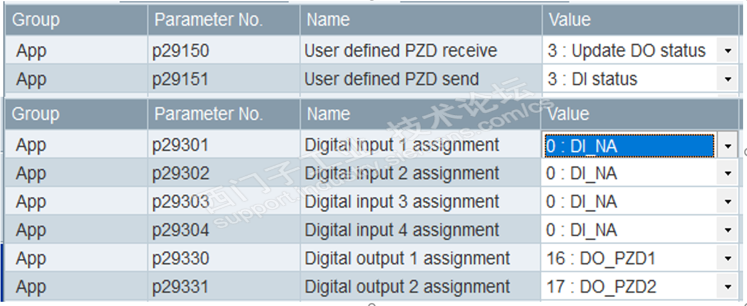
图2-3. 数字量输出DO设置
采取这种PLC通过通信的方式对驱动器的数字量输出进行控制,可以避免远距离的I/O布线,节省PLC的I/O点。
2.4 支持低惯量的1FL6多圈绝对值电机
1) 做为对SIMOTICS S-1FL6系列伺服电机的扩展,SIMOTICS S-1FL6低惯量多圈绝对值编码器的伺服电机已于01/22/2020同步上市,其功率从0.5KW到2KW,配套驱动为SINAMICS V90 230V系列。
2) 对于低惯量多圈绝对值伺服电机,除具备一般低惯量电机的高动态响应及安装尺寸精巧的优点外,由于其编码器类型为20位+12位多圈,因此具有更高的定位精度。
3) 由于多圈绝对值编码器具备12位(4096)圈数,因此在设备掉电重启后,相较于单圈绝对值编码器,能够保持长距离的机械位移,实际位置值不会丢失。
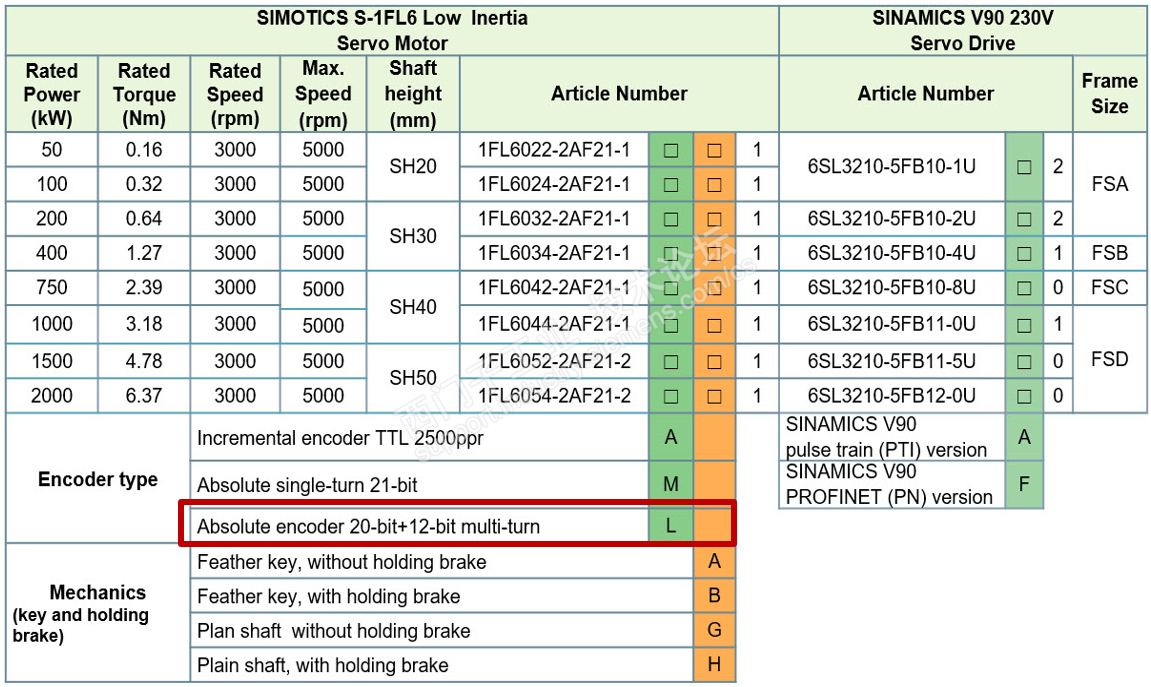
图2-4. 电机及相匹配的驱动器订货信息
3 V90 PN新固件1.04可靠性优化
对于全新的V90 PN固件1.04版本,在系统可靠性做了进一步的改进和提升:
(1)新增用于提升稳定性的参数
· 引入新的参数P1433,设置基于机械结构的转速控制器参考模型的固有频率。
· 引入新的参数P1981,设置磁极位置检测的最大行程(电气角)。
(2)针对SIMOTICS 1FL6低惯量电机,改善驱动器内部电机的热保护模型,确保电机在过载状况下的正常运行。
(3)增强编码器的内存保护,有效减少编码器连接不良及EMC干扰导致的F52985等问题。
(4)修复Profinet通讯设置(IP地址和站名称)在重复上电之后丢失的问题,确保Profinet通讯正常。
(5)修复了一键自动优化之后的,运行到固定停止点功能无法维持输出转矩的问题。









 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国


 普通
普通



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
