西门子官方在使用S7-1200/1500与G120驱动进行速度控制已经有很典型的应用场景了,也有相关的说明文档可供下载。虽然FB285的封装形式有了一些改变,但本质基本都是不变的。
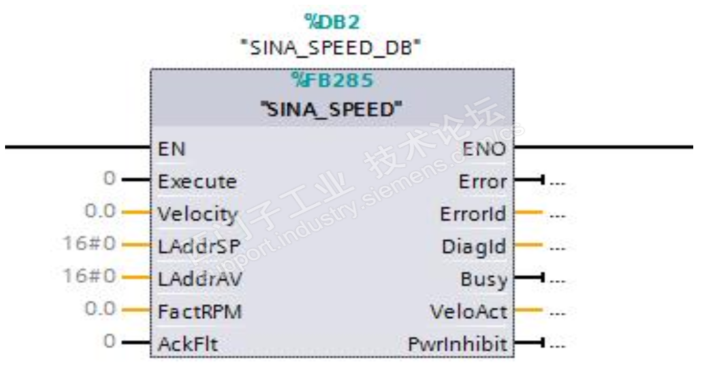
图1 博图V14使用的FB285

图2 博图V15及以上使用的FB285
原理都是S7-1200/1500和G120等驱动配置“标准报文1”,然后使用“激活命令”、“速度设置”等输入引脚,从而实现驱动的速度控制。
这次在现场项目使用的是S7-1500和G120的速度控制,和以前不一样的是,G120使用了抱闸功能,在G120参数中需要单独配置抱闸参数“break control”。关于抱闸参数可以参考其他文档资料,不做详细介绍。下面只简单说下抱闸功能和FB285之间的使用关系。
因为在抱闸功能的打开使用了G120的DO数字端口功能,所以使用FB285时,“EnableAxis”为true,抱闸DO提前打开,抱闸线圈松开,电机运转。“EnableAxis”为false,电机减速停止,转速为0,抱闸DO关闭,抱闸线圈抱死。
到这里,基本的抱闸电机的转速控制都没有问题。但是用户提出来一个需求,现场操作人员在检修保养的时候,需要单独打开电机抱闸来实现电机的空转。
因为抱闸功能是用G120的DO端口,所以我在想如果单独控制DO是不是就可以实现这个单独打开抱闸的功能。但是碰到一个实际的问题就是,同一个DO不能有2套功能。这个时候我就打起了PN总线通讯的主意,是不是可以用报文里面的控制字来实现DO的打开?在查询了相关文档以后,我发现标准报文的STW1控制字并没有全部使用,有几个预留的参数,那么用这几个参数是不是就可以了?
最后经过测试,在修改G120的参数和FB285的“ConfigAxis”引脚参数,就实现了单独控制抱闸线圈的功能。
参考方法如下:
(1)修改G120总线参数
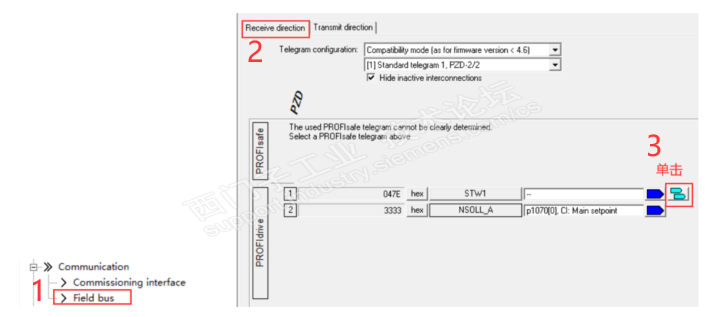
图3 打开G120总线参数
增加r2090.12 = p855[0] ,强制打开抱闸功能。其他参数默认不变,否则影响FB285的正常使用。注意,修改完成后,要Copy RAM to ROM。
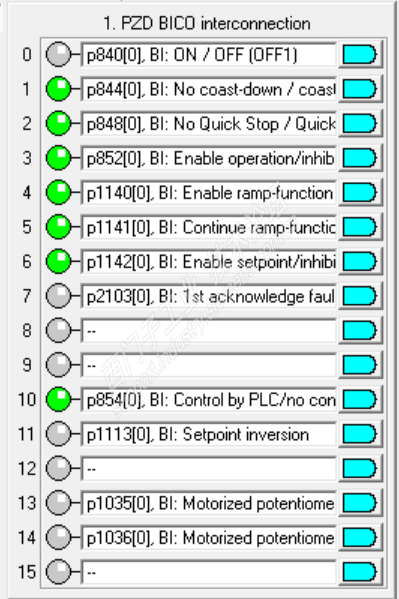
图4 STW1修改前报文参数
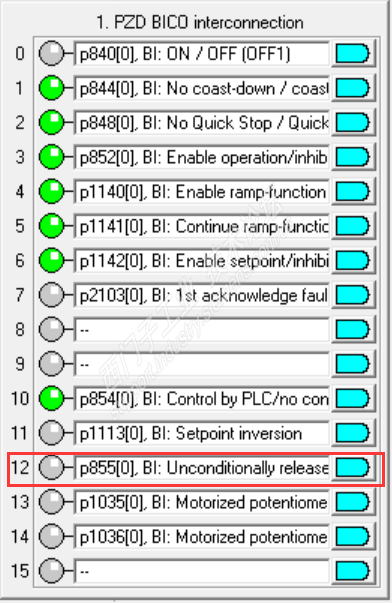
图5 STW1修改后报文参数
(2)修改PLC程序
FB285的“ConfigAxis”输入引脚增加一个16位word型变量。增加一段程序:
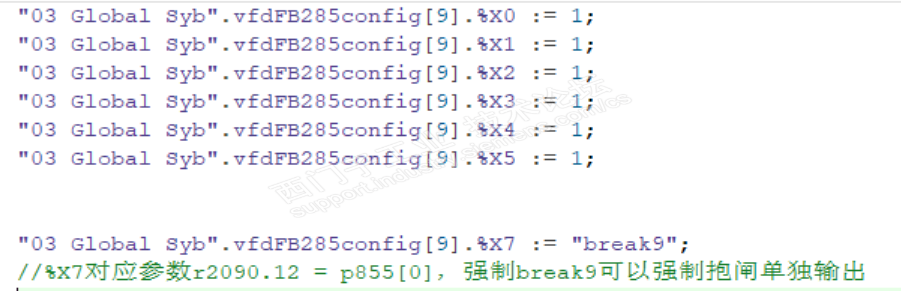
图6 PLC程序参考
程序说明:在FB285标准使用中,ConfigAxis输入16#003F,电机即可进行速度控制。这里因为需要单独增加抱闸打开功能,所以ConfigAxis的bit7需要关联HMI变量。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
