各位前辈,想请问下,Fanuc机器人和西门子PLC走PN通讯的时候,有类似于EIP通讯的那种启动块吗,看到官方LCCF库里面,是有一个EIP通讯启动机器人程序号的FB块,但是PN通讯的没有找到。
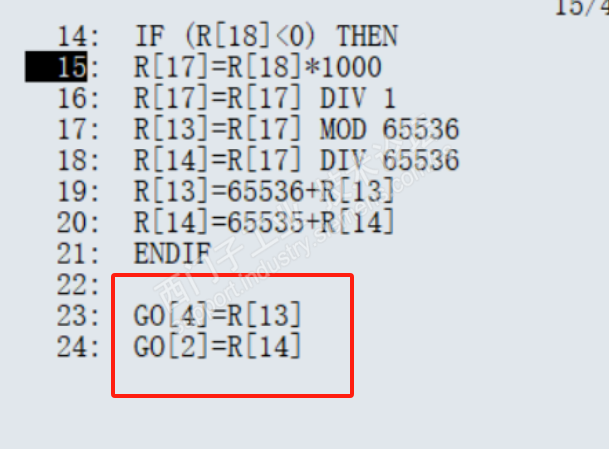
还想问下,传输机器人坐标的时候,如果机器人本身坐标是负的话,该怎么处理呢,目前想到的是,加一个标志位,机器人内部乘(-1)把坐标发PLC后,PLC在乘回来,但是看到还有一种处理方法是加65535这种,没太明白是什么原理,因为在PLC侧没有看到把机器人+的65535减掉,大概能明白是想把GO里面的数转成正数发PLC。但是不太理解,这种处理方式。
R18是机器人X的坐标,GO4 GO2分别拆出了整数与小数部分,没有太理解这种写法。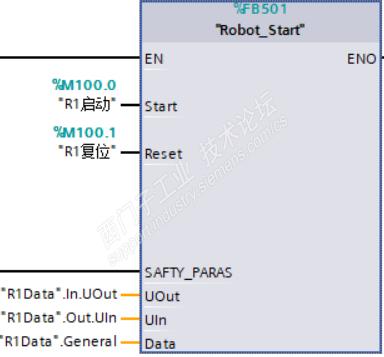










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
