西门子PLC使用LRCF库与安川机器人进行Ethernet/IP通信
硬件系统构成
PLC:S7-1200 1214C DC/DC/DC 系统版本4.5及以上。
机器人控制柜:安川YRC1000。
西门子TIA 软件 V17l
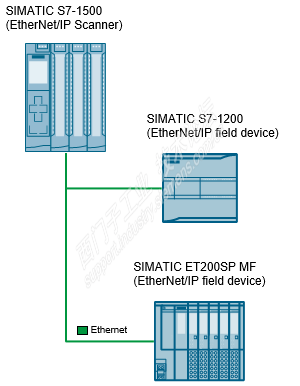

PLC做主站,机器人做从站。
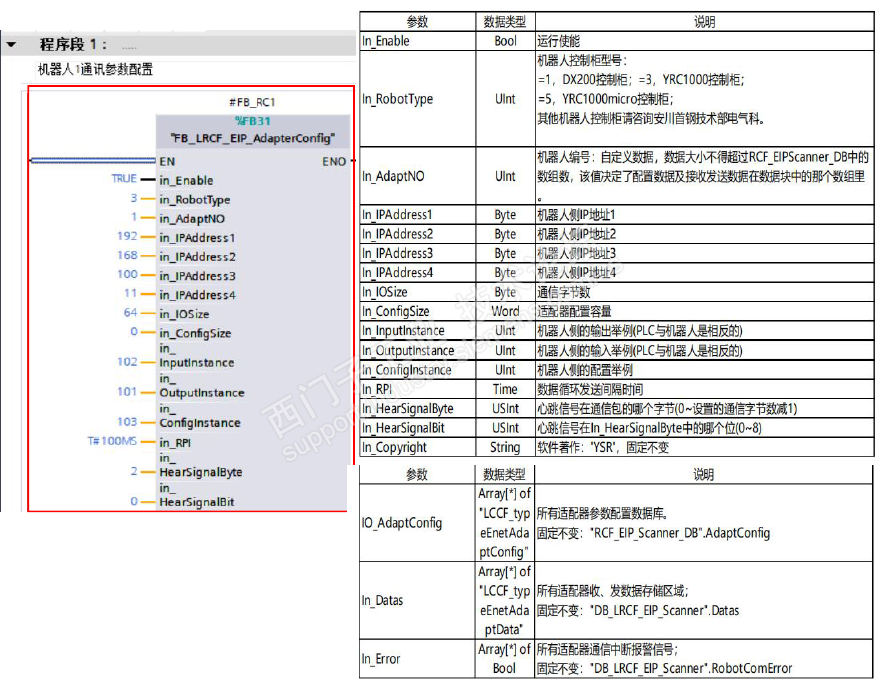
1.使用的功能块为西门子 1200系列 PLC 与机器人通过 EtherNet/IP 协议通信时的参数配置功能块。
机器人侧Ethernet/IP设定
1.2 机器人开通Ethernet/IP功能后,按下图设定。
按住示教器主菜单键,开启机器人电源,进入维护模式。
然后再进入管理模式。找到选项功能菜单。
( Ethernet/IP是选项功能需申请厂家开通)

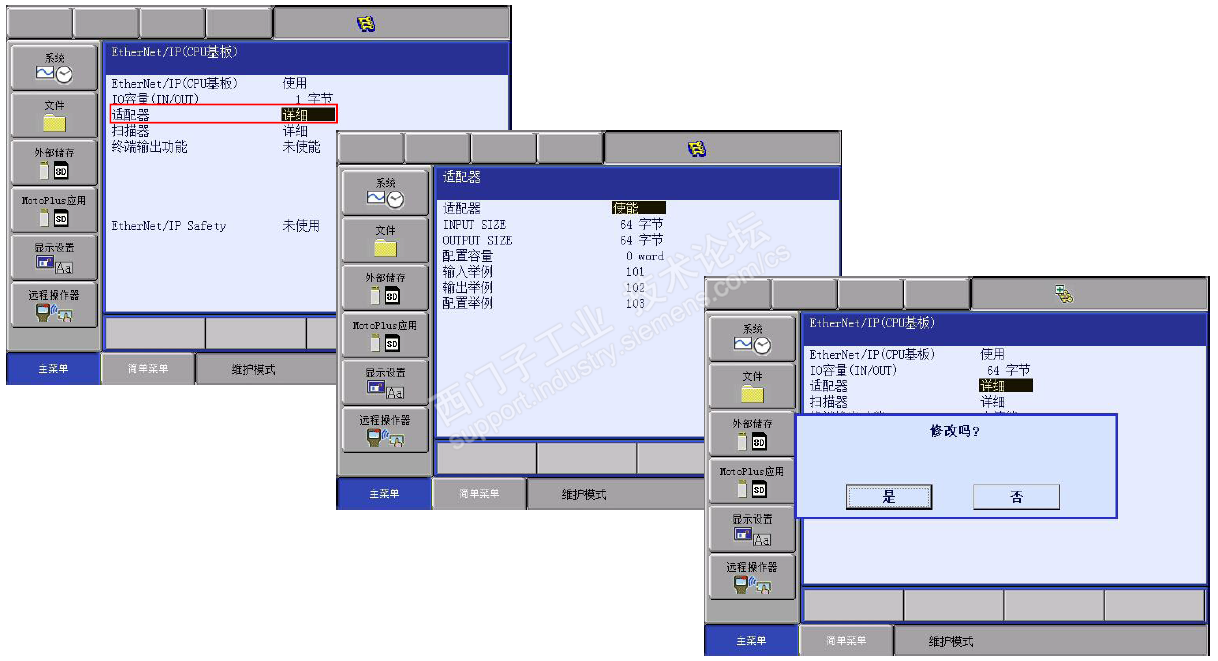
机器人侧Ethernet/IP设定
1.3 在选项功能中找到EtherNet/IP,进入详细设定。

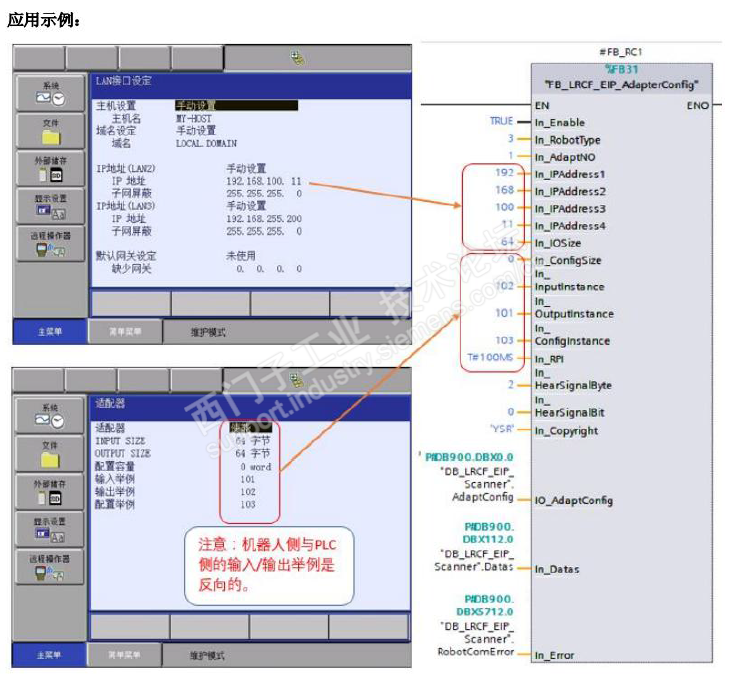
1.4 机器人做从站,在适配器详细里设置信息,设定后按回车键,确认修改。
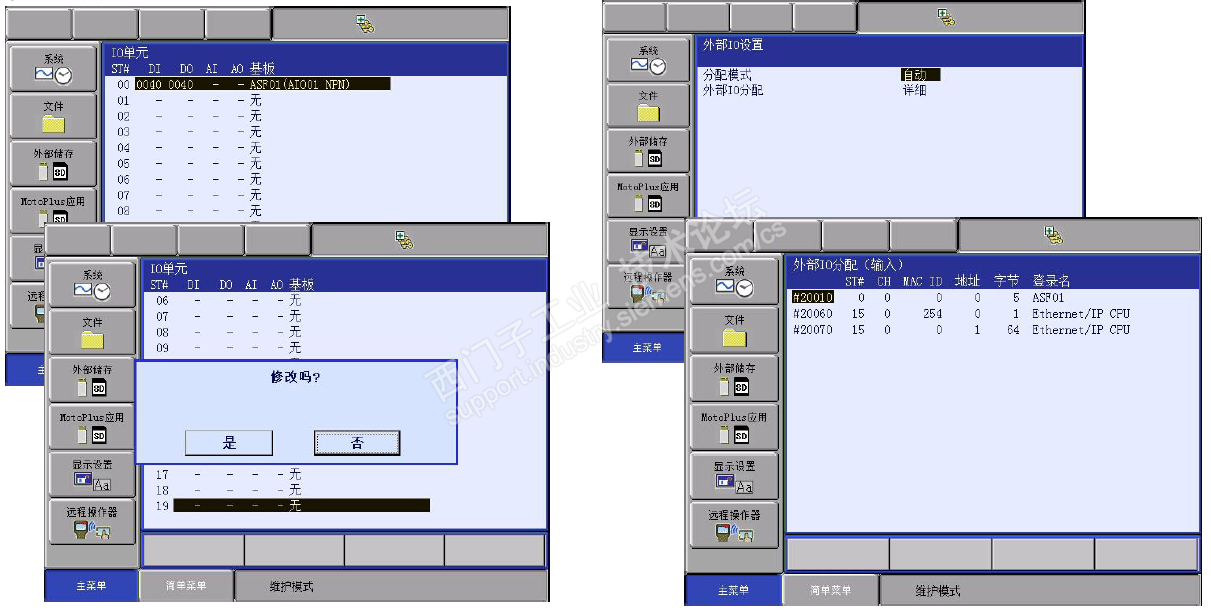
1.5 多次按回车键,确认IO单元的设定点击修改,设定外部IO设置后点击修改。在适配器详细里设置息,设定后按回车键,确认修改,随后重启机器人到在线模式。
LRCF功能块的引脚简要说明
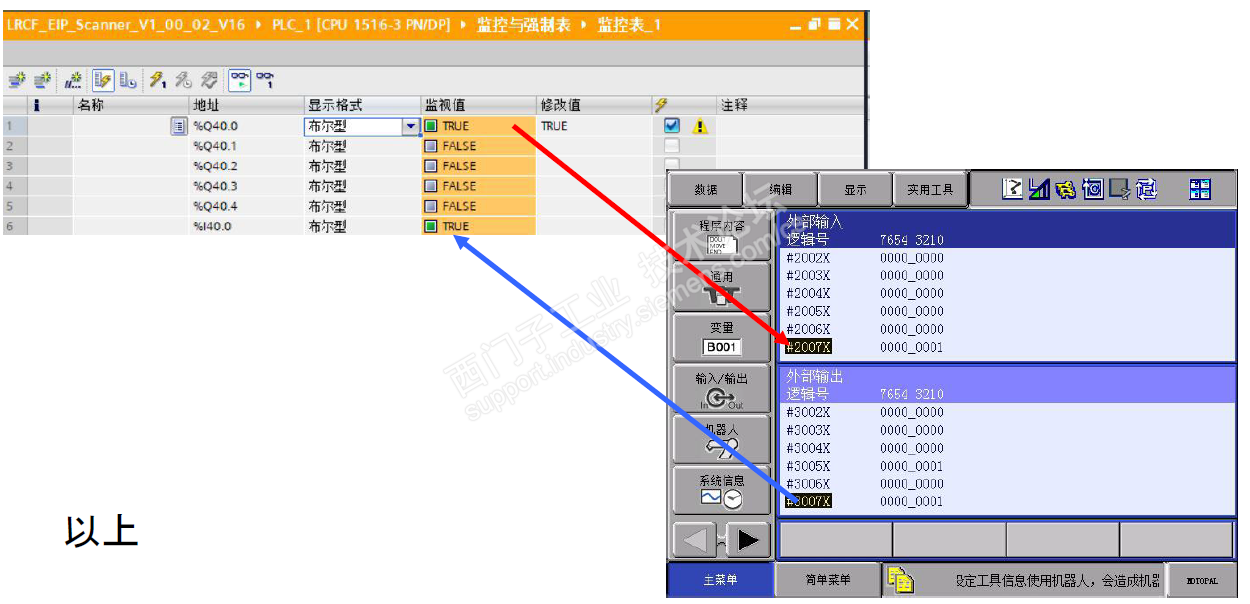
 2.15 添加监控表,输入监控地址,点击全部监视,右键修改Q地址的值为1,
2.15 添加监控表,输入监控地址,点击全部监视,右键修改Q地址的值为1,
同时机器人强制输出外部输出,检查信号状态检查和机器人的输入输出信号状态。
关于Ethernet/IP通信西门子官方文档请参照LRCF库
EtherNet/IP Scanner – Connecting third party I/O’s using EtherNet/IP - ID: 109782314 - Industry Support Siemens
关于Ethernet/IP通信安川机器人官方文档请参照下面网址
http://uploadfile.gongkong.com/Upload/gongkong/technicalDataAttachment/202208/31/ef788d6a420b4e75ab5d1098bec13576.pdf
http://c.gongkong.com/YASKAWA/m105421.html
另外请注意in_RPin 引脚值,值请设定为100ms(通信延迟 )









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐





















 短信登录
短信登录
