

















 西门子官方商城
西门子官方商城
- 自动化系统
- 驱动技术
- 低压电气
- 工业服务
- 其他
更多
常问问题  5.0 分
5.0 分
Simotion轴的限位功能
文档编号:F0606|
文档类型:常问问题|
发布时间:2024年02月01日
- 0
- 443
- 2012
1概述 机械轴在实际运行中,对其运行行程应有软件位置限位及硬件位置限位的要求,如图1所示。SIMOTION轴的运行范围限制可通过数字量输入的限位开关进行监控。硬件限位开关通常为常闭点,当轴的运行超出范围时激活硬件限位报警。还可以设置轴的软件限位位置并进行监控。 ......
1概述
机械轴在实际运行中,对其运行行程应有软件位置限位及硬件位置限位的要求,如图1所示。SIMOTION轴的运行范围限制可通过数字量输入的限位开关进行监控。硬件限位开关通常为常闭点,当轴的运行超出范围时激活硬件限位报警。还可以设置轴的软件限位位置并进行监控。

图1. 轴软、硬件限位示意
在SCOUT软件中应对轴的硬件限位及软件限位进行参数设置,通过双击轴中的“Limits”条目打开设置画面:

硬件限位及软件限位的参数设置画面:
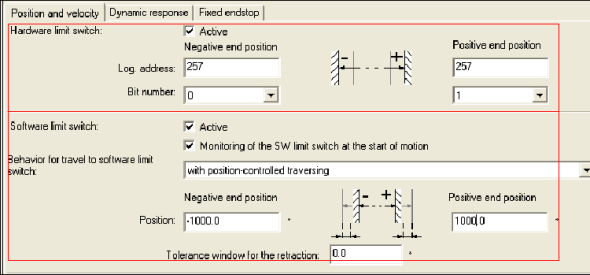
图2. SCOUT 4.1.5.6限位设置
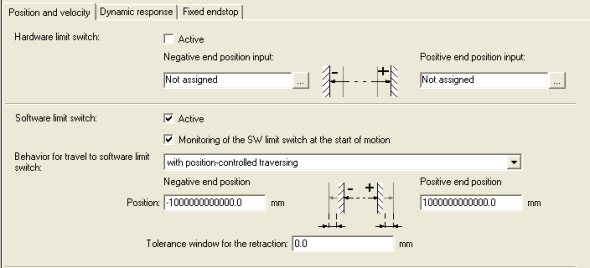
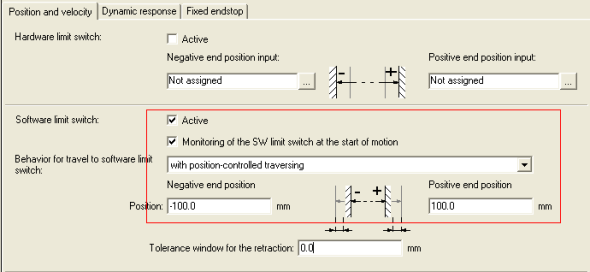
图3. SCOUT 4.2.1限位设置
2 硬件限位监控
运行范围的极限通过数字量输入及限位开关来进行监控。
硬件限位开关正常时为常闭状态,超出运行范围时变为常开状态。
硬件限位开关的激活:
(1) 勾选图2,3画面中Hardware limit switch 的Active选项。
(2) 设置正向及负向硬件限位开关的地址,此开关可以是CU320上的数字量输入点也可以是ET200S上的数字量输入点。
• SCOUT 4.1.5.6软件中,硬件限位开关的设置需在图2中的“log address:”设置框中分别输入正负限位开关的地址,在“Bit” 设置框中输入正负限位开关的地址位,如图2中设置PI257.0为负向限位开关,PI257.1为正向限位开关。• 4.2.1软件中,硬件限位开关如果连接到Simotion设备的DI点上可通过点击“Negative end position Input”及“Positive end position Input”设置框右侧的按钮可直接选择;也可以输入开关地址(同图2设置)。
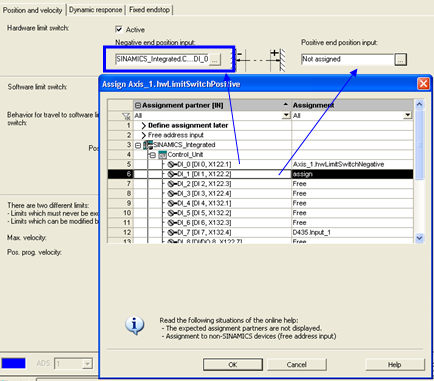
图4. SCOUT 4.2.1硬件限位开关设置
当轴运行至限位开关时触发工艺报警50007:

可通过两种方式进行处理:
● 手工处理 (无驱动)
通过手工将轴移动至允许的行程范围,离开此限位开关,复位故障信息,重新使能轴后可运行轴。
● 通过驱动处理
工艺对象报警必须被确认。报警信息 Alarm 50009: Limit switch exceeded 仍然保持。当限位开关被激活时轴只能在相反的方向运行。重新使能轴后,沿反方向移动轴离开限位开关。当轴离开限位开关时,sensorMonitoring.hwLimitSwitchMinus 及sensorMonitoring.hwLimitSwitchPlus 的状态为OK,离开限位开关后Alarm 50009故障信息可被确认。当碰到限位开关时,其位置被存贮。
注意:
轴一旦运行超过限位开关,控制器必须不能掉电以避免限位开关的极性与在允许位置区域的限位开关方向监控的冲突。如果控制器掉电,限位开关极性信息会丢失。轴必须用人工将其移动至允许位置范围。当控制器上电后,轴必须位于允许位置范围内。
如果限位开关被配置做为反向开关或零点开关,这时在回零期间此限位开关即使在激活状态也可被覆盖。
3 软件限位监控
软件限位开关的激活:
(1) 勾选图2,3画面中“Software limit switch” 的Active选项。
(2) 勾选“Monitoring of the software limit switches at start of motion”:使能开始运动时监控软件限位功能。
(3) 在“Behavior for for travel to software limit switch”选择框中选择:指定的监控软件限位功能仅在位置控制模式或在所有的模式下使能。
(4) 在“Negative end position”中输入负运动方向软件限位开关的位置值。
(5) 在“Positive end position”中输入正运动方向软件限位开关的位置值。
(6) 在“Tolerance window for the retraction”中输入软件限位开关的位置允差。
当实际值有效时,软件限位开关可被设置并监控。软件限位的位置应在硬件限位开关位置之内。
当轴运行至软件限位位置时触发工艺报警 40105,40106。

可通过两种方式进行处理:
● 手工处理 (无驱动)
通过手工将轴移动至允许的行程范围,离开此限位开关,复位故障信息,重新使能轴后可运行轴。
● 通过驱动处理
软件限位到达后出现报警信息40106,故障复位后报警信息消失,再使能轴后让轴运行至反方向离开软件限位位置。
如果软件限位开关也可用在没有回零的轴上进行位置监控,则
必须设置轴的配置数据“homing.referencingNecessary = NO”。
当设置配置数据“homing.referencingNecessary = YES”时,仅在轴找到零点后软件限位监控功能才有效。
对于同步运动及路径运动,软件限位监控也有效。对于违背软件限位位置时,同步运动及路径运动以最大减速及最大加加速度终止。
4 开始运动检查
在运动开始前,控制器检查限位情况。如果轴位置超过软件开关,轴被限制到软件限位开关位置并且触发报警信息40107,轴将不会接受运动命令。配置数据“TypeofAxis.Swlimit.monitoringAtMotionStart”可用于激活或不激活在运动开始时的检查功能。
若激活软件限位功能:
(1) 当设置轴的配置数据“homing.referencingNecessary = NO”(软件限位开关也用在没有回零的轴上进行位置监控)时,如果轴未回过零点(PositioningState.home=No),则系统上电后将当前位置读出后与软件限位设置的位置进行比较,若超出软件限位范围则将当前位置记作软件限位值。
例如:上电时轴的状态为未回过零,实际位置=160mm,超出软件限位位置100mm,此时出现报警信息40107。复位故障信息后使能轴再反向运行轴,如果之后再正向运行轴时当位置到达160mm时报到达软件限位故障40107。
(2) 当设置轴的配置数据“homing.referencingNecessary = Yes”(软件限位开关用在已回零的轴上进行位置监控)时,如果轴已回过零点 (PositioningState.home=Yes) ,仅在轴找到零点后软件限位监控功能才有效。
关键词
SIMOTION,轴,软件限位,硬件限位


- 评论









 关联文档
关联文档


隐私政策更新提示
欢迎您来到西门子数字化工业支持中心网站!我们使用cookies来确保您能最好地使用我们的网站,进行网站分析并根据您的兴趣定制内容。我们有时会与第三方共享cookie数据。继续浏览本网站,即表示您同意我们使用cookies。您亦可以参考西门子数据隐私政策以了解更多相关信息。
同意并继续浏览















扫码分享