1 反向间隙补偿概念 在运动的机械部分和相应的驱动间进行能量传递的时候,常常会产生反向间隙。如图1所示。 &nbs ......
1 反向间隙补偿概念
在运动的机械部分和相应的驱动间进行能量传递的时候,常常会产生反向间隙。如图1所示。
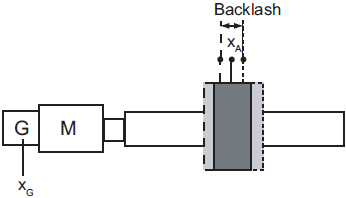
G:编码器
M:电机
XG:编码器实际值
XA:轴的位置
图1 反向间隙
尽管存在反向间隙,也必须实现可以从编码器的位置清楚地得到轴的位置,进而对轴做位置控制和同步操作。为达到此目的,SIMOTION提供了反向间隙补偿功能。
反向间隙在轴的配置数据“ absBacklash.length”或者“incBacklash.length”中指定,反向间隙补偿的速度在“absBacklash.velocity”或者“incBacklash.velocity ”中指定。其中,前缀“abs”表示所用编码器为绝对值编码器,“inc”表示所用编码器为增量式编码器。
反向间隙补偿只在编码器安装在电机侧时有效,而且需对每一个编码器单独设置。对于直接测量系统,通过闭环控制来补偿任何存在的反向间隙。
2 间隙类型
• 正的间隙
正的间隙在absBacklash._type = POSITIVE 或者incBacklash._type = POSITIVE 中设置。
设置= POSITIVE 意味着机械位置滞后于编码器实际值。比如,当滚珠丝杠开始运动,而编码器装在电机上(默认为通常情况),当反向时,间隙补偿就起作用了,以设定的间隙补偿速度运动。
• 反的间隙
不支持设置absBacklash._type = NEGATIVE
不支持设置incBacklash._type = NEGATIVE
3 增量式编码器轴的反向间隙补偿
在回零中,轴的位置基于回零标志的参考信号得到,编码器的值被唯一分配给轴的位置。
如果存在间隙,轴在回零过程中,必须总是从同一侧运行至同步点。因而实际控制位置的值和轴的机械位置值可以保持一致。
这适用于:
• 通过编码器零标识位回零
• 通过外部零标识位回零
• 通过设置实际值回零(把轴位置设置为指定的值)
方向反转和增量式编码器行为:
如果设置incBacklash._type = POSITIVE,当反向时,电机运行穿过间隙范围。在此电机运动期间,机械位置和显示的轴实际位置并不改变,然而,编码器的值 sensordata.incrementalPosition 却发生了改变。之后,轴运行到指定位置。
如果使能了间隙补偿功能,当完全穿过间隙范围一次后(不论什么方向),如果方向反转,就会补偿所设定的间隙值。这与轴是否回零无关,间隙补偿是独立于“已回零”状态的。也就是说即使轴处于非回零状态,轴的相对或绝对运动都可应用间隙补偿功能。需要注意的是,当控制单元开启后,首次运动不考虑间隙补偿,只有运动方向改变时才会使用此补偿功能。
如图2所示,如果需要使用反向间隙补偿功能,则必须把“Backlash on reversal compensation”勾选上。
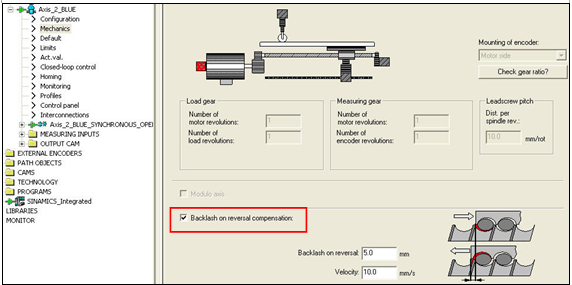
图2 反向间隙补偿设定(增量式编码器)
然后在“Backlash on reversal”中设置反向间隙补偿的距离,如图3所示。
图3 反向间隙补偿距离设定(增量式编码器)
在“Velocity”中设定反向间隙补偿的速度,如图4所示。
图4 反向间隙补偿速度设定(增量式编码器)
图5 轴的反向间隙补偿运动过程(增量式编码器)
如图5,显示了轴的反向间隙补偿的运动过程。橙色曲线表示轴的实际位置值,黄色曲线表示轴的实际速度值,蓝色曲线表示补偿反向间隙的计算过程,黄褐色曲线表示轴的位置设定值。
如图中标号,整个运动过程可以分为4个部分:
区域①:轴以给定速度匀速正向运行,轴的位置值线性增加,设定值和实际值基
本重合,无补偿反向间隙计算过程。
区域②:轴接收到反向运行命令,开始反向运行。反向运行过程中,轴首先以所
设定的补偿速度开始补偿反向间隙,这由蓝色曲线跳变可以看出。在此
过程中轴的位置设定值是直线性减小的,而轴的位置实际值是不变的。
显示的轴的速度实际值为0,而事实上,电机正以所设定的补偿速度运
行穿过间隙距离。可由蓝色曲线的再次跳变观察出何时反向间隙补偿完
毕。
区域③:反向间隙补偿完毕,但轴的位置设定值和实际值有偏差,轴的实际值要
跟随上设定值,所以此范围内轴的速度为反向间隙补偿速度叠加上轴的
反向运行速度,只有如此,轴的实际位置值才能够跟随上设定值。由波
形可看出,轴的实际位置值与设定值的偏差在逐渐减小,直至重合。
区域④:轴的实际位置值与设定值已保持一致,轴的速度值不再是两个速度的叠
加,而只是轴的反向运行速度。
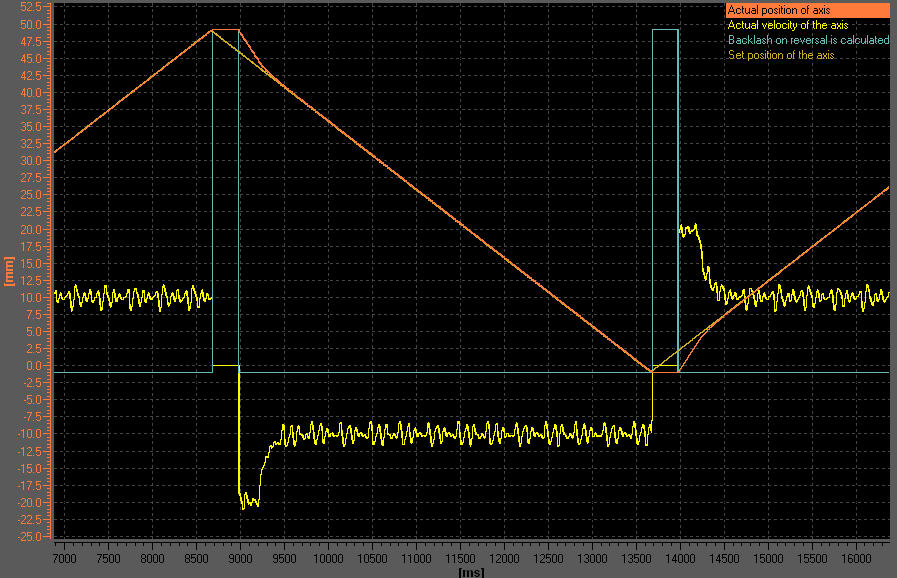
图6 轴的反向间隙补偿(增量式编码器)
由图6可以看出,轴在由正向到反向运行和由反向到正向运行时,都会进行反向间隙补偿。也就是说,只要轴运动方向改变,就会进行反向间隙补偿。
4 绝对值编码器轴的反向间隙补偿
绝对值编码器回零调整后,通过定义绝对值编码器偏移量把绝对值编码器的值赋给机械的轴位置。
这就决定了绝对值编码器与方向是相关的。这是因为当设置绝对值编码器偏移量或机械轴位置时,间隙位置与编码器值/轴位置是相关的,这与增量式编码器有区别。也就是说,如果轴的起始运动方向是正向,当轴开始运动时存在两种可能:第一种,轴先以补偿速度越过间隙范围,然后再以给定速度运动;第二种,没有齿轮间隙,直接以给定速度运动。
在绝对值编码器调整后,如果方向反转,就会执行反向间隙补偿;但是如果以同一方向持续运行就不会执行间隙补偿。
如果控制器关断,机械的轴位置赋给编码器;如果控制器开通,机械的轴位置由编码器来指定。同样地,在绝对值编码器调整后重新开始运动,如果运动方向相同,则不会激活间隙补偿;但是如果运动方向相反,就会激活。
在absBacklash.startupDifference配置数据变量中,如果希望首次运动不激活间隙补偿,而只在方向反转时才进行反向间隙补偿,那么此处应设置为与设定运动方向相反的方向。比如控制器开启后,运动方向为正向(Positive),则应设置 absBacklash.startupDifference = NEGATIVE 。如果希望首次运动时也激活间隙补偿,那么此处应设置为与设定运动方向相同的方向。比如控制器开启后,运动方向为正向(Positive),如果设置absBacklash.startupDifference = POSITIVE,则首次运动也会激活间隙补偿功能。
方向反转和绝对值编码器行为:
在设置absBacklash._type = POSITIVE 条件下,当方向反转时,电机运行穿过间隙范围。在此电机运动期间,机械位置和显示的轴实际位置并不改变,然而,编码器的值 sensordata.incrementalPosition (也适用于绝对值编码器)却发生了改变。于是,轴以指定距离移动,或者移动到指定位置。
方向反转的间隙补偿独立于“已回零”状态(这里指绝对值编码器调整)。这意味着,当控制器开启时,无论编码器回零与否,如果使能了间隙补偿功能,当完全穿过间隙范围一次后(不论什么方向),只要轴的运动方向反转,就会补偿反向间隙。
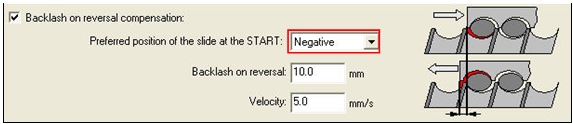
图7 反向间隙补偿设定(绝对值编码器)
如图7所示,如果已知轴的起始运动方向为正向(Positive),把“Preferred position of the slide at the START”选项设为“Negative”。则意味着轴在控制器接通后,第一次正向运行时不会激活反向间隙补偿,只有在轴反向运动时才会激活反向间隙补偿功能。“Backlash on reversal”选项和“Velocity”选项含义与图3,图4表述相同,不再赘述。
如图8所示,橙色曲线表示轴的实际位置值,黄色曲线表示轴的实际速度值,蓝色曲线表示轴的位置设定值,青色曲线表示补偿反向间隙的计算过程。由图中①可见,轴在首次正向运动时,并未进行反向间隙补偿。由图中②可见,只有轴在运动方向改变时,才会进行反向间隙补偿。
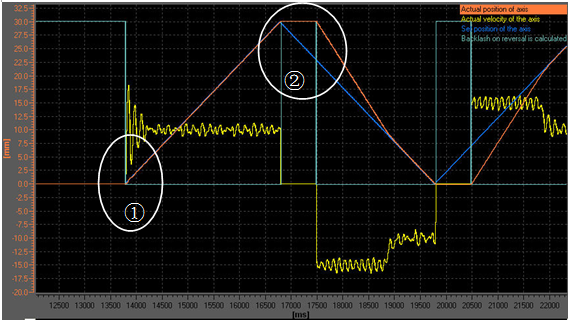
图8 轴的反向间隙补偿(绝对值编码器)
如图9所示,如果已知轴的起始运动方向为正向(Positive),而把“Preferred position of the slide at the START”选项也设为“Positive”。这意味着轴在控制器接通后,第一次正向运行时同样会激活反向间隙补偿,在轴反向运动时也会激活反向间隙补偿功能。
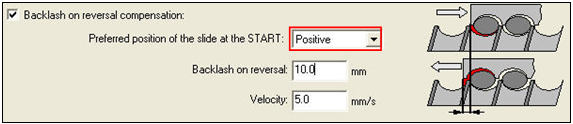
图9 反向间隙补偿设定正向(绝对值编码器)
如图10所示,橙色曲线表示轴的实际位置值,黄色曲线表示轴的实际速度值,蓝色曲线表示轴的位置设定值,青色曲线表示补偿反向间隙的计算过程。由图中①可见,轴在首次正向运动时,就进行了间隙补偿。由图中②可见,轴在运动方向改变时,也会进行反向间隙补偿。
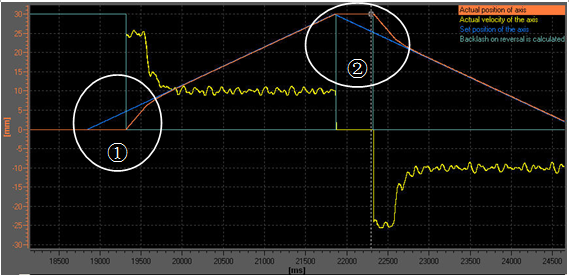
图10 轴的反向间隙补偿(绝对值编码器)
5 状态显示
轴的系统变量sensorMonitoring.passingBacklash 可以显示轴正在通过间隙而实际轴位置并不发生改变。
图11中显示了反向间隙补偿功能在运动过程中的动作顺序。
图11.a为轴根据运动指令所得到的速度设定值的曲线,从零速开始加速运动到设定速度,然后匀速运行。
图11.b显示了轴的反向间隙补偿速度的设定值以及开始、结束的时间点。在竖虚线左边的曲线表明了反向间隙补偿速度的设定值及开始时间,到竖虚线处补偿完毕。此时仅仅补偿了轴的反向间隙,而轴的位置设定值和实际值仍有偏差,从竖虚线往右开始轴以反向间隙补偿速度叠加轴的速度开始追赶轴的位置设定值,等轴的位置设定值和实际值重合,整个过程才结束。
图11.c显示了电机位置的改变,竖虚线左边的曲线表明了间隙补偿的距离。
图11.d显示了实际位置(或称机械位置/显示位置)的改变。与图11.c比较可知,在竖虚线左边的曲线一直是恒定不变的,这表明在反向间隙补偿过程中,电机反向运行穿过间隙范围,但显示的轴实际位置并不改变,补偿完毕后轴的实际位置才发生改变。
图11.e显示了在系统变量中间隙补偿的状态及开始、结束的时间点。
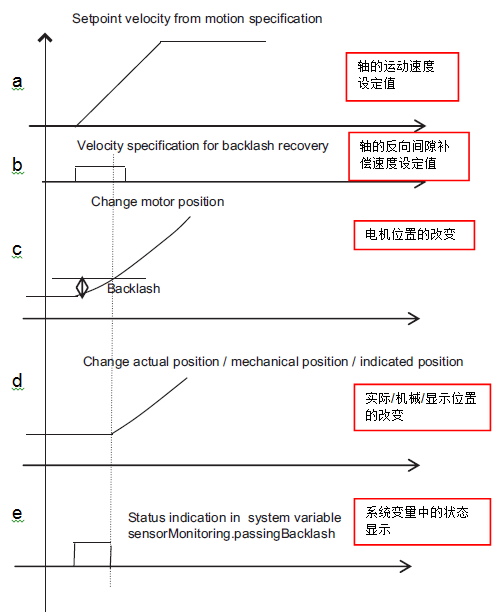
图11 反向间隙补偿顺序
关键词
SIMOTION,轴,反向间隙补偿
您可以前往全球资源库查看此文档


















 西门子官方商城
西门子官方商城









 关联文档
关联文档

















扫码分享