内容预览:
描述:
本文介绍了SIMATIC Safety Matrix软件的简单入门使用。本文适合于初次使用Safety Matrix软件的用户
......
1. 安全矩阵Safety Matrix概述
1.1 安全矩阵Safety Matrix概述
SIMATIC Safety Matrix是用于 S7 F/FH Systems故障安全自动化系统的安全生命周期工程设计和管理的综合工具。在进行S7 F系统组态与编程过程中,除使用CFC外,还可以使用SIMATIC 安全矩阵。安全矩阵不仅可以简化安全逻辑编程,还可以用于操作和维护。
SIMATIC Safety Matrix软件有以下几大优点:
· 大大简化安全逻辑的组态与编程,显著提高编程效率
· 尤其对于大量安全功能回路的应用场合,组态与操作更清晰、明确
· 更直观的安全功能回路SIF、因果关系与在线因果状态
· 多种可用的安全逻辑因果关系和选举模式
· 操作员无需掌握F系统的编程与组态知识
· 可选的、已经预置的、全面的上位机报警
· 方便与其他标准或安全程序进行扩展的编程连接
· 自动集成软件旁路、仿真、超驰等应用功能
SIMATIC安全矩阵可使安全逻辑的编程大大简化、更加高效,编程速度与常规方法相比也显著加快。在对工厂进行风险分析并给SIS系统提供安全功能要求 因果图后,组态工程师可更清晰地将定义的安全响应(结果)分配给相关的触发事件(原因)。这种分配表示为因果矩阵,并可以以此为 S7 F/FH Systems创建 CFC 安全程序。
1.2 安全矩阵Safety Matrix软件与订货
SIMATIC Safety Matrix需要结合SIMATIC F Systems软件使用。两者同时使用时,需基于SIMATIC PCS 7软件环境。这里列出典型软件的相应版本的订货信息。
| 软件名称 | 版本 | 订货号 |
| SIMATIC Safety Matrix Tool | V6.2 | 6ES7 833-1SM02-0YA5 |
| SIMATIC Safety Matrix Viewer | V6.2 | 6ES7 833-1SM62-0YA5 |
| SIMATIC F Systems | V6.1 | 6ES7 833-1CC02-0YA5 |
SIMATIC PCS 7 AS/OS
Engineering Software ASIA | V8.0 | 6ES7 658-5AX08-0CA5
|
* 更多订货信息,请参考SIMATIC PCS 7产品目录。
表1 Safety Matrix软件的相关订货信息
SIMATIC Safety Matrix软件分为Tool、Editor和Viewer三种形式。
· Safety Matrix Tool 用于在PCS 7环境中,创建、组态、编译和下载安全矩阵,以及进行操作员控制和监视
· Safety Matrix Editor 用于在没有PCS 7/STEP 7的外部PC上,创建、组态、调试和记录安全矩阵逻辑
· Safety Matrix Viewer 用于通过OS单站/OS客户端,只进行操作员控制和监视安全矩阵
始终推荐在工程师站(比如,PCS 7工程师站)上,使用SIMATIC Safety Matrix Tool软件,用于安全矩阵的编程、组态与调试等。
使用SIMATIC Safety Matrix以及S7 F Systems软件进行编程,您可以使用下面链接中的文档作为参考。
《SIMATIC 工业软件 Safety Matrix 配置手册》
条目号: 19056619
19056619 |
《SIMATIC 过程控制系统 PCS 7 提纲 B 部分 - 过程安全》
条目号: 35016980
35016980 |
《SIMATIC 工业软件 S7 F/FH Systems 组态和编程》
条目号: 2201072
2201072
|
2. 本例的安全功能实例介绍
在本例中,我们将以一个简单的功能安全子系统为背景,在PCS 7软件环境下,来完成Safety Matrix的组态。实例中,包含两个安全功能回路:
注:本例中的安全实例是基于软件环境:PCS 7 V7.1 SP3 欧洲版、S7 F Systems V6.1 SP1和SIMATIC Safety Matrix V6.2 SP1中实现。其它版本的应用差别请参考相关手册。
(1) 马达(电机)急停 安全功能回路
在正常工作状态下,马达可由操作员自由控制;当急停开关被按下时,马达应立即停止(安全状态),且操作员可以看到电机已被强制停止(安全状态)。
(2) 罐体内过压时放空 安全功能回路
在正常工作状态下,放空阀可由操作员自由控制;当检测到罐体内过压时,放空阀应立即打开(安全状态),且操作员可以看到放空阀已被强制打开(安全状态)。这里检测罐体内压力采用“二选一(1oo2)”选举方式。
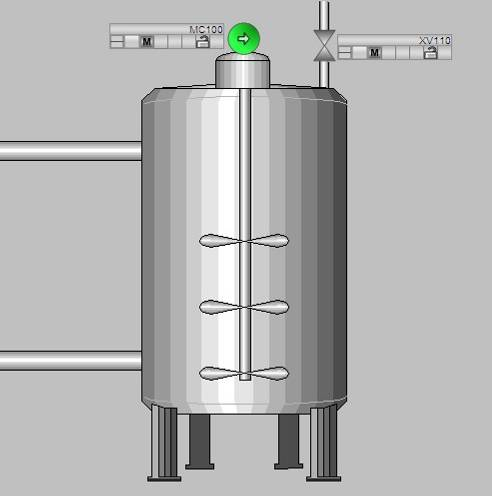
图1 本例的安全子系统模型
3. 安全矩阵Safety Matrix组态步骤
在进行Safety Matrix组态前,应进行必要的前期设计与规划。在系统投入运行之前,应对Matrix的组态进行全面考虑,尽量避免系统运行后对Matrix修改而带 来的不便。比如,在系统投入运行之前,应将Matrix的原因行和结果列进行充分考虑以及必要的定义(比如,确定原因行和结果列的数量等),以便在以后可 能的修改中,可以在系统运行中完成修改的下装。
3.1 新建用于放置F I/O驱动块的CFC图表
在项目工厂视图中,在已设计好的工厂层级中插入一个(或多个)CFC图表,并分配名称。打开CFC,插入Matrix矩阵中所需的所有F I/O驱动块。(这里使用了外置F I/O驱动块的方式,并始终推荐这个方式。)如图2与图3所示。
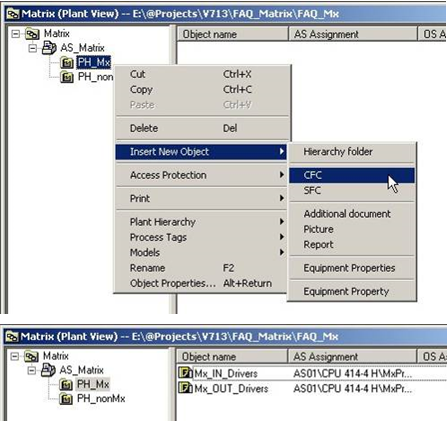
图2 插入用于放置驱动块的CFC图表
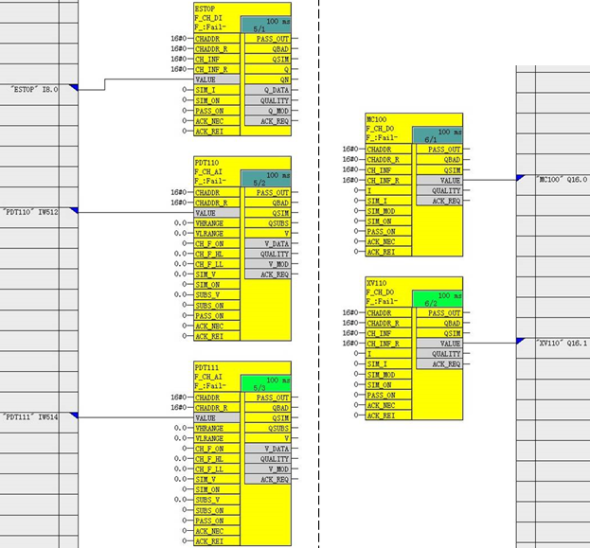
图3 在CFC图表中插入所需的F I/O驱动块
完成F I/O驱动块的放置后,推荐进行第一次CFC编译,并生成相关的模板驱动。
3.2 新建Matrix矩阵
在项目组件视图中,选择“S7程序”右键选择插入一个新的Matrix对象 。这时,可以发现新建的Matrix矩阵生成在Matrices文件夹下。如下图所示。
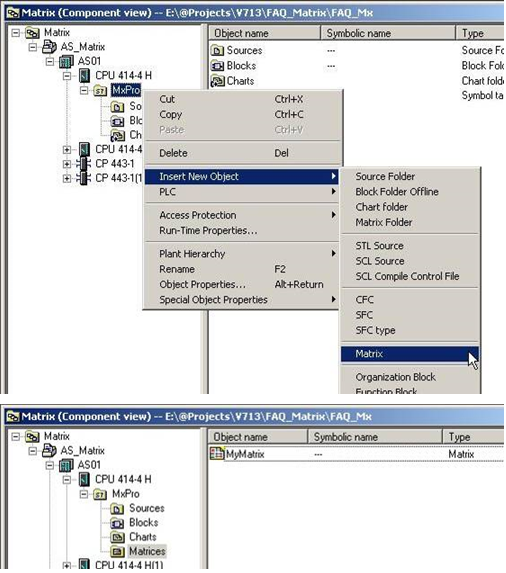
图4 新建Matrix矩阵
3.3 编辑Matrix属性
在项目组件视图中,双击打开新建的Matrix矩阵。并在左上角区域任意空白处双击, 进入下图的属性对话框。在常规属性中,编辑“标题”、“项目”、“描述”相关信息,这些将显示在 Safety Matrix 属性的信息区域中。同样,可以编辑有关此特定 Safety Matrix 的“常规注释”。(详细说明请参考Safety Matrix在线帮助。)
注意Matrix的循环时间,始终和所放置相关的F I/O驱动块程序的循环时间一致。
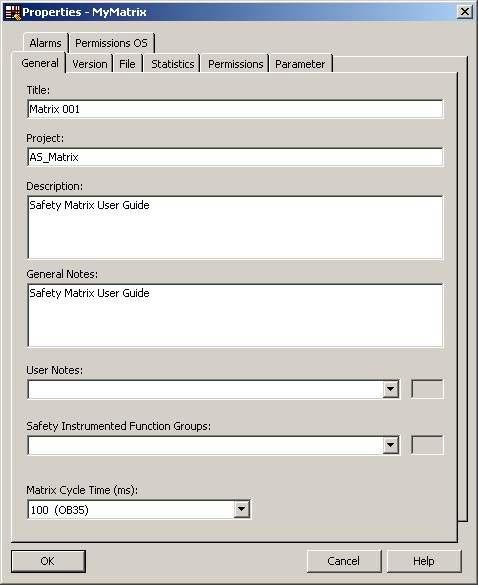
图5 编辑Matrix属性 (1)
定义所需的安全功能回路SIF。如下图所示。(本例中,定义两个SIF。)
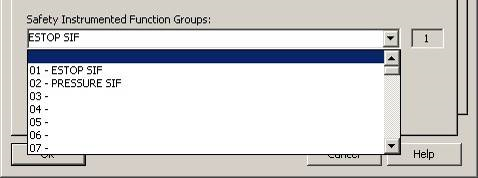
图6 编辑Matrix属性 (2)
定义“安全写”功能的相关参数以及报警相关属性。如下图所示。(详细应用请参考Safety Matrix在线帮助。)
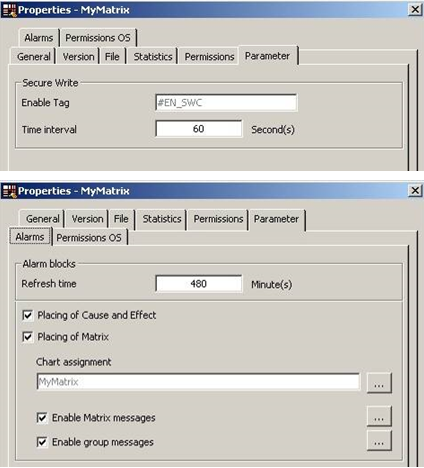
图7 编辑Matrix属性 (3)
分配操作员操作权限。为Matrix分配两个新的权限“发起者(Initiator)”和“确认者(Confirmer)”,本例中使用了101和102号权限。如下图所示。
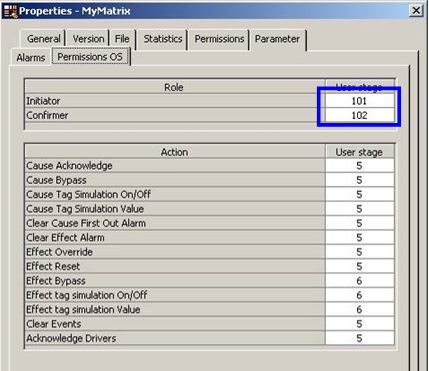
图8 编辑Matrix属性 (4)
3.4 编辑Matrix矩阵
Matrix矩阵主要由原因行与结果列及行列交叉点组成。本例中,通过组态两个简单的安全功能回路,来介绍Matrix矩阵的组态过程。
组态Matrix矩阵原因(Cause)行
组态Matrix矩阵结果(Effect)列
组态Matrix矩阵交叉点(Intersection)
3.4.1 组态Matrix矩阵原因(Cause)行
首先,组态两个安全功能回路的“原因(Cause)”。
双击矩阵的第1行。在“组态(Configure)”选项卡窗口中,定义输入类型(数字量/模拟量)、输入变量个数、输入选举类型等,并选择所需的输入变量,如下图所示。
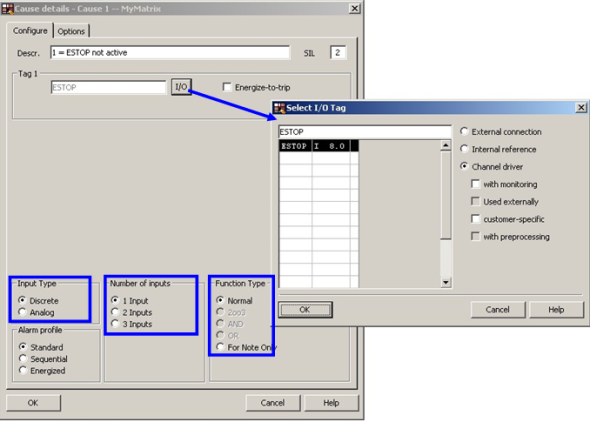
图9 组态“原因(Cause)”行 (1)
在“选项(Options)”选项卡窗口中,定义安全功能回路、时间延时、首出报警组等。(详细说明请参考Safety Matrix在线帮助。)
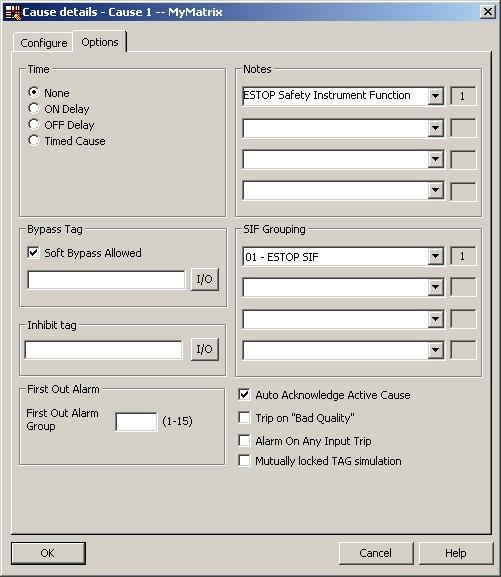
图10 组态“原因(Cause)”行 (2)
相同方法和步骤,组态其他行“原因(Cause)”。本例中,增加第2行组态。组态模拟量输入,并使用1oo2选举方式(OR),设定上限与下限,以及触发值、差异阈值、单位等。(详细说明请参考Safety Matrix在线帮助。)
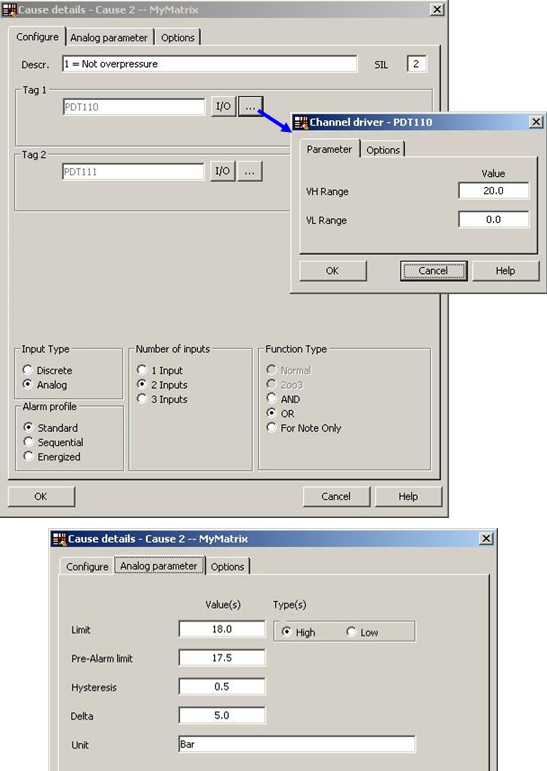
图11 组态“原因(Cause)”行 (3)
3.4.2 组态Matrix矩阵结果(Effect)列
其次,组态两个安全功能回路的“结果(Effect)”。
双击矩阵的第1列。在“组态(Configure)”选项卡窗口中,选择所需的输出变量,如下图所示。
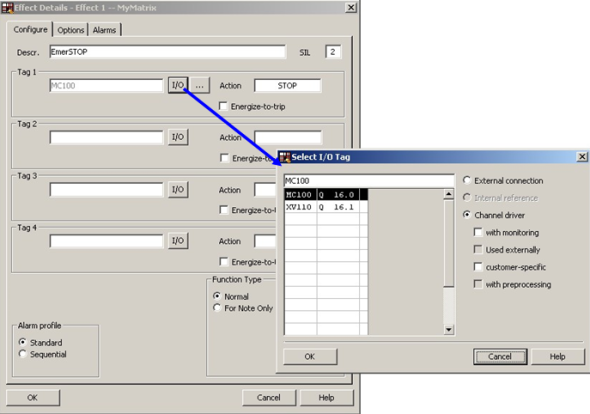
图12 组态“结果(Effect)”列 (1)
在“选项(Options)”选项卡窗口中,定义安全功能回路、输出延时等。如果需要,使能“Enable Process Data Pass Through”,并选择过程控制变量(选择External connection)。这里命名为M100CTRL,在Matrix完成传递后,将作为功能块的一个输入管脚(图20),用于与外部基本过程控制程序的 连接。
本例中,使能了“Enable Process Data Pass Through”,用于连接“在非安全紧急状态(正常状态)下,来自于操作员的控制变量”。
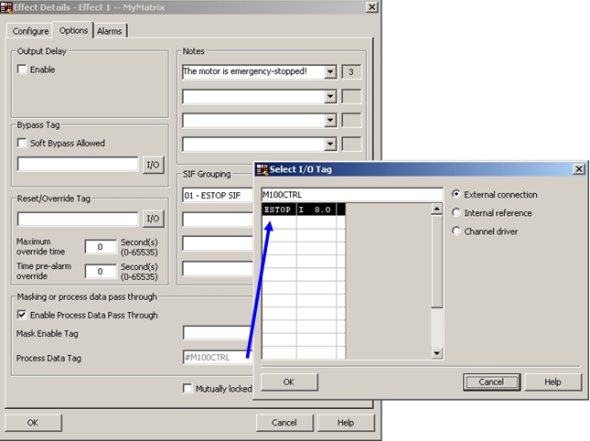
图13 组态“结果(Effect)”列 (2)
此外,为了使此马达在被紧急安全停止后,在上位机可以看到该马达已被连锁而无法操作。这里,为同一个安全功能回路定义第2个“结果 (Effect)”列。并选择一个外部连接变量。这里,命名为M100INTL,在Matrix完成传递后,将作为功能块的一个输出管脚,用于与外部基本 过程控制程序的连接。(上位机连锁效果如图23和图24)
(本例中,在同一个安全功能回路SIF中,组态了两个结果列。Matrix支持多同一个回路中的多原因、多结果的组态。)
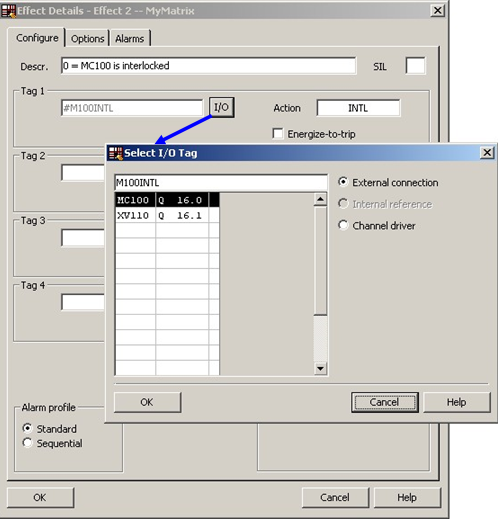
图14 组态“结果(Effect)”列 (3)
相同方法和步骤,组态其他列“结果(Effect)”。本例中,继续组态第3列和第4列,用于第2个安全功能回路。如下图所示。
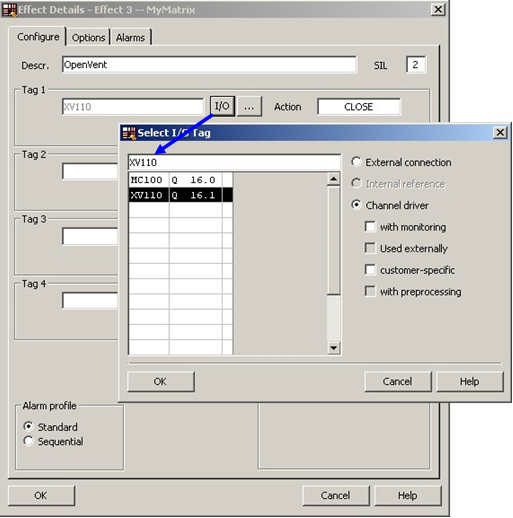
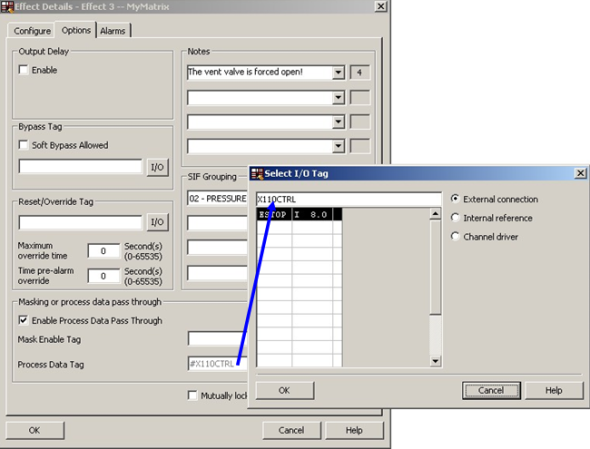
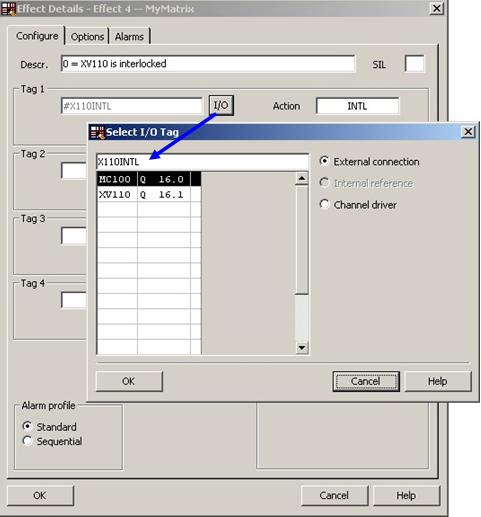
图15 组态“结果(Effect)”列 (4)
3.4.3 组态Matrix矩阵交叉点(Intersection)
最后,组态各个安全功能回路的交叉点(Intersection),也就是因果关系及特性。对于每个有因果关系的原因行和结果列的交叉点处都应组态因果特性。如下图所示。
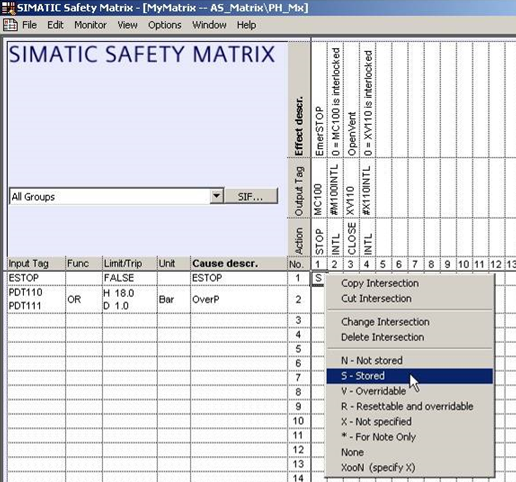
图16 组态因果交叉点 (1)
N和S是最常用的因果特性,分别表示为“结果不存储”和“结果存储”。
(1) N——结果不存储
这是简单传递的因果特性。
当原因激活时,结果也被触发;当原因取消激活时,结果也将消除。
(1) S——结果存储
这是需要手动复位的因果特性(比如,操作员手动复位确认)。
当原因激活时,结果也被触发;当原因取消激活时,结果不会被自动消除,直到进行了必要的手动复位。
更多、更详细的说明可以参考Safety Matrix在线帮助。本例中,我们使用了如下的因果关系及因果特性。
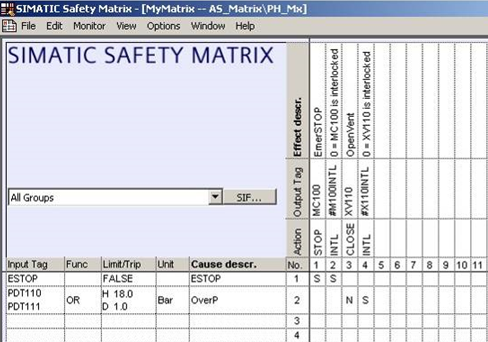
图17 组态因果交叉点 (2)
3.5 Matrix传送
完成Matrix的编辑后,保存此Matrix矩阵,并通过菜单FileTransfer进行第一次“传送(Transfer)”。对于第一次 Matrix传送,在传送对话框中,选择“Chart + Parameter”,并勾选“Use imported channel drivers (IEA support)”,报警块选择“Update all”。确认最终传送成功。如下图所示。
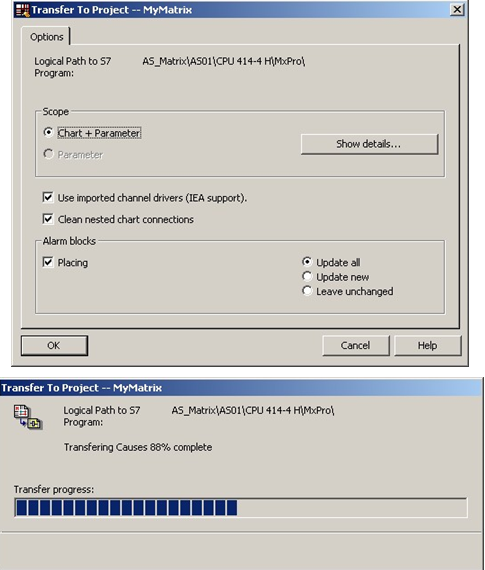
图18 传送Matrix矩阵
系统运行后,Safety Matrix支持组态的在线修改。对Matrix进行修改后需要再次传送(Transfer)和CFC编译,并之后下载到目标CPU中。如果希望在CPU 运行时修改Matrix并下载,在传送时需要选中“Parameter”,然后进行CFC编译和部分下载(Changes Only)。如果添加或删除了Matrix的行或列,将无法在运行模式下下载更改。此外,完成了Matrix修改的下载后,还需要对OS进行编译和下载。
3.6 Matrix图表位置重置与CFC编译
完成Matrix的首次传送后,在组件视图中找到生成的Matrix图表(名称与Matrix名称相同)。并通过“剪切(Cut)粘贴(Paste)”方式,将此Matrix图表放置于合适的工厂层级下,OS编译将在对应画面中生成图标等。
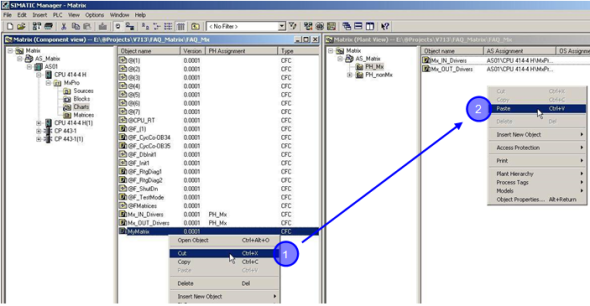
图19 Matrix图表位置重置
打开生成的Matrix图表如下图所示,可以看到已经生成用于外部连接的管脚。(输入: M100CTRL和X110CTRL;输出:M100INTL和X110INTL。)
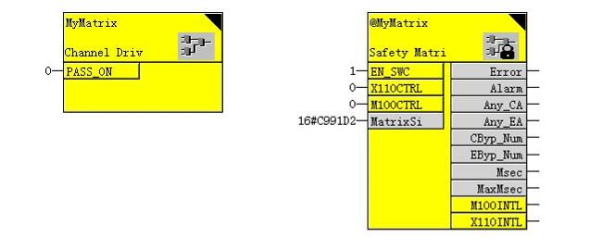
图20 传送成功后自动生成的Matrix图表
在此图表中,进行与基本过程控制程序或其他安全功能程序的必要连接。本例中的应用可参考下图所示。(本例中不包含对标准CFC编程与F Systems安全编程的讲解。)
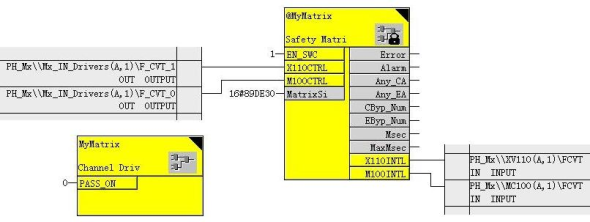
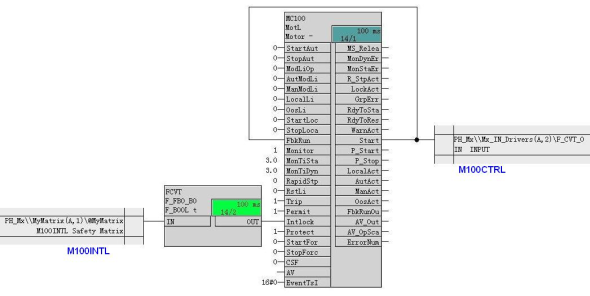
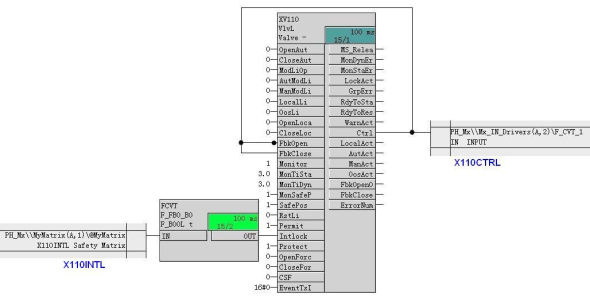
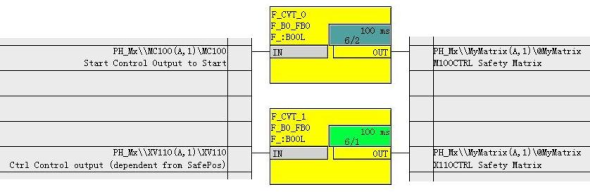
图21 必要的后续编程(相关的CFC管脚连接)
根据需要,还可将相关F I/O输入驱动块的Q_DATA、V_DATA、QUALITY和QBAD等管脚,连接相关的监视块(非安全功能块),如MonAnL和MonDiL块,用于在上位画面中。本例中不包含此扩展编程部分。
基于本例,可以扩展增加紧急停车按钮数字量监视块和两个罐体压力值监视块,同时可以扩展其在上位画面上的显示。
4. 操作员站进行Matrix测试与操作
完成CFC编译后,可以进行OS编译。OS编译成功后,可以看到系统已经自动生成了Safety Matrix相关的图标。(必要时,需要运行OS项目编辑器。)打开并运行OS项目(先下载OS,如需要),并测试Matrix及安全功能。如图22、图23和图24所示。
(本例中,选择不生成“用于连锁的结果列”的图标块。)

图22 操作员观察在无安全功能触发时的过程画面
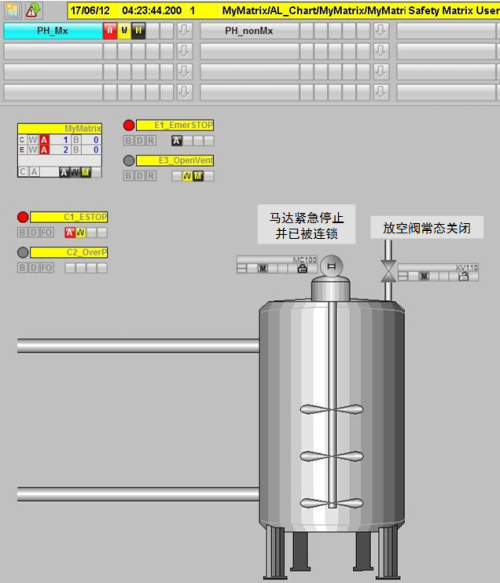
图23 操作员观察当原因产生并触发结果时的过程画面
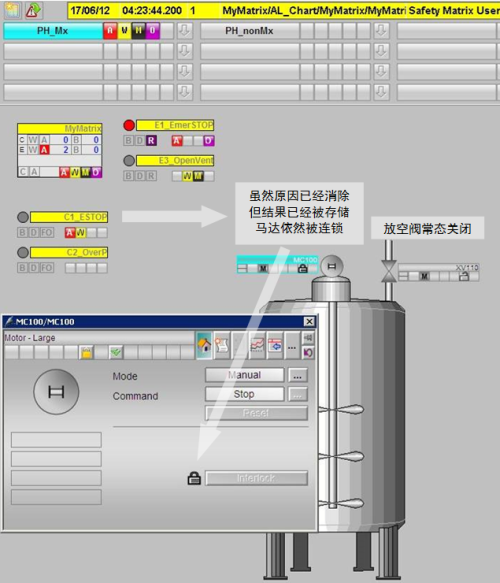
图24 操作员观察当原因消除后,结果仍被“存储”时的过程画面
单击Matrix图标块,可以查看当前的Matrix状态,也可以进行操作,比如复位被存储的结果激活状态。如图25、图26和图27所示。
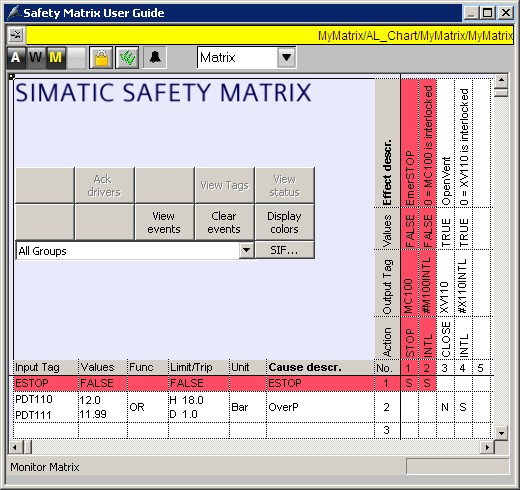
图25 操作员观察当原因产生时,结果同时被触发
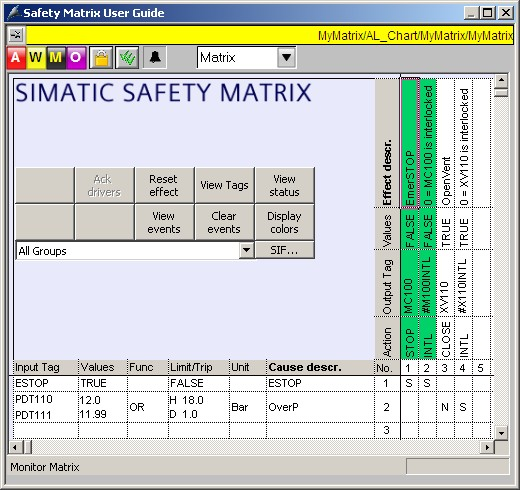
图26 操作员观察当原因消除时,结果被“存储”
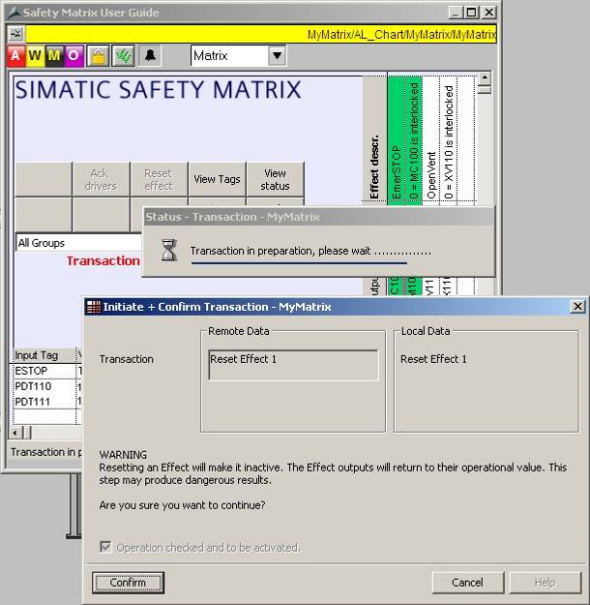
图27 操作员进行Matrix操作(对被存储的结果复位)
注意对Matrix进行操作时所需要的权限,上述复位操作需要两个用户的两个不同的权限(发起和确认权限)的配合操作。发起者 (Initiator)发起这个复位操作后,进入等待确认状态;切换用户,由确认者(Confirmer)进行确认,完成此操作(通常1分钟内)。为此, 需要事先进行OS用户权限的设置。如下图所示。
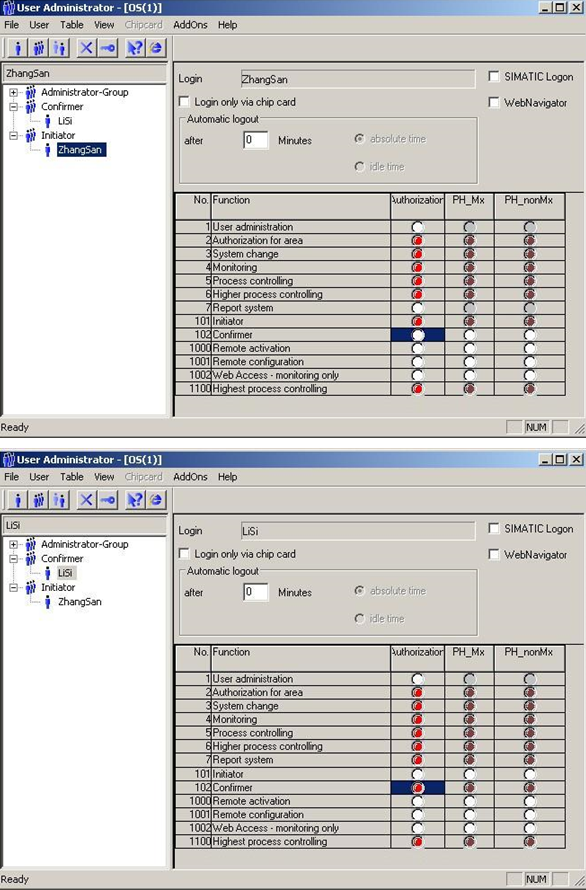
图28 OS用户权限的设置(发起与确认权限)
同样,可以在工程师站上,对Matrix矩阵进行在线监视,并进行相关操作。如下图所示。
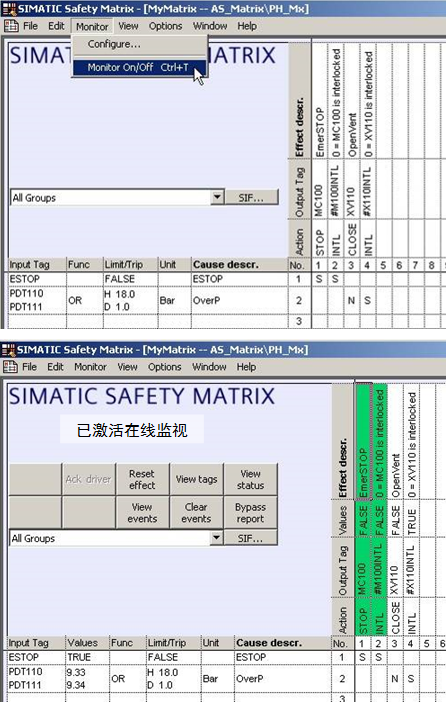
图29 工程师站在线监视与操作
在系统调试与运行维护期间,Safety Matrix提供了方便的软件旁路功能(Bypass)。选中需要旁路的原因行,点击Matrix面板上的“Bypass”按钮,按提示输入旁路原因记 录。同样,旁路操作需要“发起者”和“确认者”配合完成。已经被旁路的Matrix会在图标和面板中指示“已旁路”状态。如图30和图31所示。
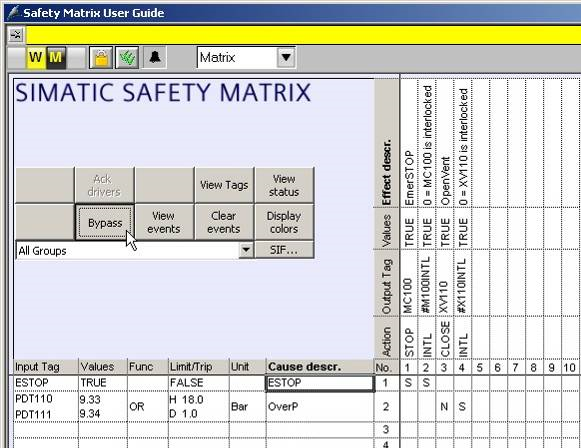
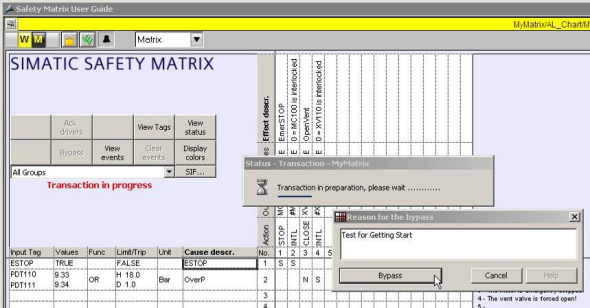
图30 在操作员站上使用Matrix软件旁路功能

图31 应用软件旁路功能后的Matrix图标与面板显示
注:仅建议在系统调试与维护期间使用Matrix软件旁路功能,当完成调试与维护工作后,应及时撤消软件旁路。
关键词
Safety,Fail-safe,安全,故障安全,F Systems,F系统,FH,Matrix,Safety Matrix,矩阵,安全矩阵,安全回路,安全功能
您可以前往全球资源库查看此文档


















 西门子官方商城
西门子官方商城












 关联文档
关联文档

















扫码分享