

















 西门子官方商城
西门子官方商城
- 自动化系统
- 驱动技术
- 低压电气
- 工业服务
- 其他
更多
操作指南 
 4.0 分
4.0 分
SIMOTION 的任务执行机制及系统时钟
文档编号:A0471|
文档类型:操作指南|
发布时间:2024年02月19日
- 0
- 982
- 6140
本文对 SIMOTION 系统中的任务执行系统和系统时钟的设置进行了介绍。
1 SIMOTION 执行系统
SIMOTION 执行系统规定了SIMOTION系统中的程序是如何被执行的。
1.1 任务执行等级
任务执行等级定义了执行系统中的程序执行的时间顺序,每个执行等级包含一个或几个任务(Task)。执行等级包括:
● 同步执行等级(Synchronous execution levels):与控制或者插补时钟周期同步
● 时间驱动的执行等级(Time-driven execution levels):时间触发任务
● 事件驱动的执行等级(Event-driven execution levels):事件触发任务
● 中断控制的执行等级(Interrupt-controlled execution levels):中断触发任务
● 顺序执行等级(Sequential execution levels): 顺序执行的任务
● 自由运行执行等级(Free-running execution levels):自由循环执行的任务
1.2 任务(Task)
每个执行等级包括一个或多个任务(Task)。每个任务在满足一定的条件时执行。用户可以指定多个程序到某个任务,还可以调整程序在任务中的执行顺序。
除了用户程序任务外,还有系统任务,系统任务的执行内容和执行顺序不可改变。
SIMOTION的任务包括:
● 系统任务( System tasks )
– 通讯
PROFIBUS, PROFINET IO 网络的连接及IO处理。非周期通讯,trace等。
– 运动控制
包括IPO/IPO_2, position control (servo),当使用工艺包时,系统自动分配执行系统。用户 程序不会影响工艺程序的执行。
– 温度控制程序
● 用户程序任务 (user program tasks)
在用户程序任务中可以执行运动控制, 逻辑和工艺函数等。用户程序任务包括:
1.2.1 StartupTask
当SIMOTION运行模式从STOP或STOPU到RUN时触发。用于变量的初始化和工艺对象的复位。在这个任务中,由于工艺对象正在初始化,不能执行运动控制命令。当此任务执行时,除了SystemInterruptTask 其他的程序都不执行。
此任务结束,达到RUN模式后,启动下面的任务:
- SynchronousTasks- TimerInterruptTasks- MotionTasks- BackgroundTask
1.2.2 自由运行任务
自由运行任务在自由执行等级中执行, 包括 MotionTasks 和 BackgroundTask 。
- MotionTasks
MotionTasks用于执行顺序执行的命令,例如运动控制的命令等。共有32个MotionTasks(MotionTask_1 到 MotionTask_32)。MotionTasks通常通过用户程序的任务控制命令例如_startTaskID,_stopTaskID来启动或停止任务。也可以通过设置使之在达到RUN模式时自动启动。还可以通过_getStateOfTaskID命令查询任务的状态。
MotionTasks只执行一次,没有事件监控,也就是说MotionTasks中的程序可以无限期的执行。
MotionTasks在执行完或者是系统达到STOP 或 STOPU模式时停止。如果有等待命令(Wait for condition /WAITFORCONDITION),任务将被挂起,设置的条件在IPO周期内被检查,当条件满足时任务被继续。WAITFORCONDITION 和 ENDWAITFORCONDITION之间的程序有更高的优先级(在 SystemInterruptTasks 和TimerInterruptTasks之间)。
- BackgroundTask
BackgroundTask用于非固定周期的循环程序的执行。Start-up任务后开始执行,在程序结束时自动重新执行。适于执行后台程序或逻辑处理程序等。
BackgroundTask的循环时间被监控,一旦超时,TimeFaultBackgroundTask被触发,如果此任务中没有分配程序则会造成CPU进入STOP模式。
1.2.3 时间驱动任务TimerInterruptTasks
- TimerInterruptTasks
用于执行有固定循环周期的任务。在程序执行结束后自动重新执行。
TimerInterruptTasks用于周期性程序的执行。有5个TimerInterruptTasks,TimerInterruptTask_1 到 TimerInterruptTask_5。
TimerInterruptTasks在固定的周期内被循环触发,这个周期要设为插补周期的倍数。
在此任务中可以实现闭环控制或者监控功能程序。
1.2.4 同步任务SynchronousTasks
SynchronousTasks与指定的系统时钟同步。
包括下列的同步任务:
- ServoSynchronousTask (软件版本4.0以上):与伺服周期同步,在此任务中可以运行对时间有严格要求的任务。例如对I/O的快速响应程序,PROFIBUS DP通讯数据的同步处理,伺服层面的设定值的修改。
- IPOSynchronousTask/IPOSynchronousTask_2:与IPO周期同步
在IPOSynchronousTask中,可以实现对时间有严格要求的功能,用户程序在插补之前运行。在此任务中可以执行一些对TO的操作。
1.2.5 事件驱动任务
当一个事件发生时,启动此类任务,执行一次后停止。
- SystemInterruptTasks
当一个系统事件发生时,SystemInterruptTasks被调用。
有下面的SystemInterruptTasks :
● TimeFaultTask:TimerInterruptTask 超时时执行
● TimeFaultBackgroundTask:BackgroundTask 超时时执行
● TechnologicalFaultTask:TO发生故障时执行
● PeripheralFaultTask:发生 I/O错误时执行
● ExecutionFaultTask:执行程序错误时执行
如果SystemInterruptTasks被触发,如果没有分配程序会造成CPU停机。
最多可以有8个不同的中断被缓存,如果此时有另一个中断发生,缓存会溢出CPU停机。触发SystemInterruptTasks的事件可以由TaskStartInfo来查询。
启动ExecutionFaultTask的程序执行错误包括:
● 浮点数的错误操作,例如对负数取对数,错误数据格式等
● 除0
● 数组超限
● 访问系统变量错误
发生错误的任务将会被停止。
对于下面的任务发生了错误可以在ExecutionFaultTask中用命令重新启动:
● StartupTask
● ShutdownTask
● MotionTasks
对于下面的任务发生了错误,在ExecutionFaultTask结束后CPU达到STOP,启动ShutdownTask :
● BackgroundTask
● TimerInterruptTasks
● SynchronousTasks
ExecutionFaultTask 和 ShutdownTask中的编程错误会立即导致系统停机。
- UserInterruptTasks
当一个用户自定义事件发生时,UserInterruptTasks被调用。
有两个用户中断任务:UserInterruptTask_1 和 UserInterruptTask_2。必须指定UserInterruptTask的条件,当条件满足时,UserInterruptTask被执行。如果同时被触发,UserInterruptTask_1 在 UserInterruptTask_2之前被执行。
如果使用UserInterruptTask,那么也必须使用IPOsynchronousTask。因为UserInterruptTask的条件在IPO周期中被检查。
UserInterruptTask在StartupTask 和 ShutDownTask期间不被执行。
1.2.6 ShutdownTask
ShutdownTask 在CPU从RUN模式到STOP或STOPU模式时被执行一次。可以执行例如设置输出点的状态或轴的停止命令等。此任务不会在系统失电时执行。
还需要设置ShutdownTask的监控时间,过了设置的时间后CPU会自动到STOP模式。
1.3 任务的执行
任务在执行等级中的分配如图1。图2 表示了SIMOTION中任务的执行顺序,由上而下。图3 为SIMOTION任务在时间上的分配。
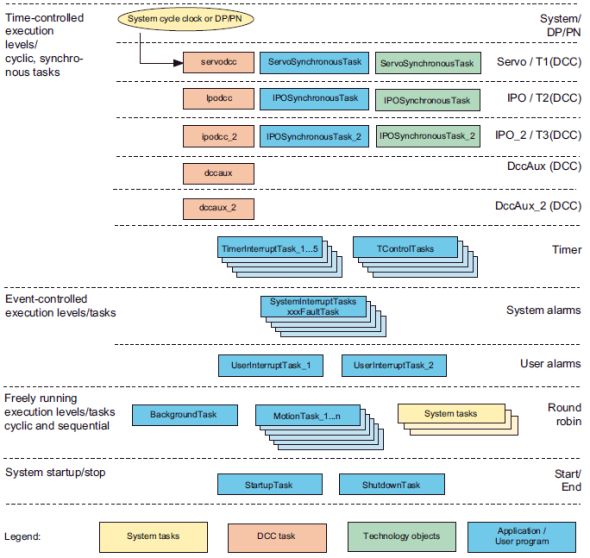
图1 任务在执行等级中的分配
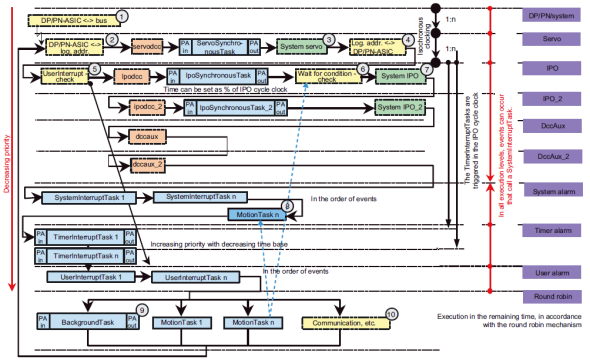
图2 任务的执行顺序
对图2的注释:
DP, Servo 和 IPO 的比例是 1:1:1
蓝/绿:用户程序任务
黄:系统任务
1. DP/PN-ASIC <-> Bus
通讯的芯片和PROFIBUS 或 PROFINET IO进行数据交换。
2 DP/PN-ASIC -> log. addr
IO输入数据从通讯芯片加载。
3. System servo
在伺服时钟周期内进行系统计算(位置控制器等),如果在此周期内程序不能计算完会造成溢出,进入STOP模式,禁止启动,并在诊断缓冲区中记录。只有在重新上电后或下载后才能再次启动。
4. Log. addr. -> DP/PN-ASIC:
I/O 输出写入到通讯芯片
5. UserInterrupt - Check:
检查用户中断程序的条件
6. Wait for condition - Check:
WAITFORCONDITION (等待轴,等待信号等) 命令的条件被检查。
7. System IPO/IPO_2:
IPO中的系统程序(运动控制:定位曲线,同步操作等)
8. MotionTask n:
WAITFORCONDITION等待中的MotionTask 当条件满足时被优先执行(更高的优先级).
9. BackgroundTask:
Background背景数据块 (PI) 在BackgroundTask 开始时和结束后被刷新。如果程序的运行时间比较长,BackgroundTask在运行时可能被高级的任务打断几次。
10. 通讯:
通讯功能 (HMI, PG/PC等)
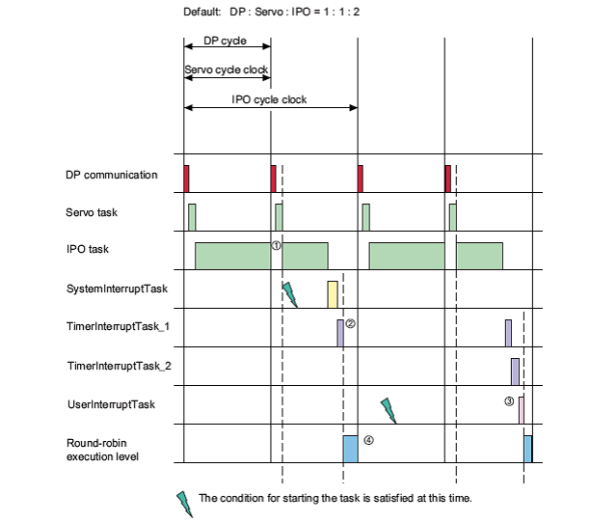
图3 SIMOTION任务的执行
1 IPO任务中执行的程序比伺服周期时间长,此时,IPO任务被中断然后执行DP通讯和伺服任务。然后IPO任务继续执行。
2 IPO 任务结束后, 执行SystemInterruptTask ,然后执行低优先级的TimerInterruptTask 。
3 UserInterruptTask即使在条件满足的条件下,也是在高优先级的任务结束后执行。
4 自由执行等级任务在剩余的时间执行。
1.4 任务的优先级
如果两个任务的程序在某个时刻同时执行,那么任务的优先级决定了哪个任务先执行。
| 优先级 | 执行等级 | 任务 | 周期(z)/顺序 (s) | 注释 |
| 高 | Servo, DP 通讯 | - | z | |
| Servo / T1(DCC) | Servodcc ServoSynchronousTask ServoTask | z | DCC 实时任务组中的任务 (T1) 伺服周期中的用户程序任务 系统任务 | |
| IPO / T2(DCC) | Ipodcc | z | DCC 实时任务组中的任务 (T2) | |
| IPOSynchronousTask • 检查 UserInterrupt • 用户程序 | z | 插补周期的用户程序任务 | ||
| IPOTask • 检查 WAITFORCONDITION 的条件 (IPO,system) | z | IPO 周期中的系统任务 | ||
| IPO_2 / T3(DCC) | Ipodcc_2 | z | DCC实时任务组中的任务(T3) | |
| IPOSynchronousTask_2 | z | 插补周期2的用户程序任务 | ||
| IPOTask2 | z | IPO2 周期中的系统任务 | ||
| TControlTasks | PWMsynchronousTask | z | 温度控制任务 | |
| InputSynchronousTask_ 1 | z | 温度控制任务 | ||
| InputSynchronousTask_ 2 | z | 温度控制任务 | ||
| PostControlTask_1 | z | 温度控制任务 | ||
| PostControlTask_2 | z | 温度控制任务 | ||
| + 附加的系统任务 | z | DCC实时任务组中的任务(T4) | ||
| DccAux (DCC) | Dccaux | z | ||
| DccAux_2 (DCC) | Dccaux_2 | z | DCC实时任务组中的任务(T5) | |
| SystemInterruptTasks | TimeFaultTask | s | 系统报警 (按事件发生的顺序) | |
| TimeFaultBackgroundTask | s | 系统报警 (按事件发生的顺序) | ||
| TechnologicalFaultTask | s | 系统报警 (按事件发生的顺序) | ||
| PeripheralFaultTask | s | 系统报警 (按事件发生的顺序) | ||
| ExecutionFaultTask | s | 系统报警 (按事件发生的顺序) | ||
| TimerInterruptTasks | TimerInterruptTask1 ... TimerInterruptTask5 | z ... z | 定时器中断 | |
| UserInterruptTasks | UserInterruptTask_1 UserInterruptTask_2 | s s | 用户中断(按事件的顺序) | |
| Round robin | BackgroundTask | z | 用户程序任务(不能指定顺序) | |
| MotionTask_1 ...MotionTask_32 | s ... s | 用户程序任务(不能指定顺序) |
表1 任务的优先级
任务的优先级不能由用户改变。注意:
1 对于TimerInterruptTasks: 设定的时间越短优先级越高
2 所有的UserInterruptTasks优先级是一样的,按照触发的顺序一一执行。
3 Wait for condition / WAITFORCONDITION命令可以暂时提高MotionTask的优先级。
- 条件的检查优先级与UserInterruptTasks一样。
- 条件满足时,之前被挂起的MotionTask被重新使能
- WAITFORCONDITION 和 ENDWAITFORCONDITION 之间的命令在更高的优先级内执行(SystemInterruptTasks 和 TimerInterruptTasks之间)。
2 执行系统的配置
2.1 分配程序到执行等级和任务中
用户的程序必须分配到执行等级和任务中才能执行。可以分配MCC,ST或者LAD/FBD程序到一个或多个任务中。也可在一个任务中分配多个程序。
分配的程序按照列表中的顺序依次执行,此顺序可以在SCOUT中指定。后面的程序必须在前面的程序结束后才能执行。
可以将一个程序分配到几个任务中,此时他们在不同任务中独立运行。
当分配一个程序时,也就定义了该程序的执行优先级,执行模式是顺序执行还是循环执行以及程序变量的初始化。
分配一个程序到一个或多个任务时应注意:
- 被分配的程序必须被编译过且没有错误
- 在下载程序之前进行分配
- 当一个程序在执行时,有可能被另外一个任务调用。这时系统不能保证数据的一致性。
- 当分配了一个程序到任务后,即使重新编译程序也会保持分配状态。
在Scout项目浏览界面中选择EXECUTION SYSTEM打开任务配置界面。
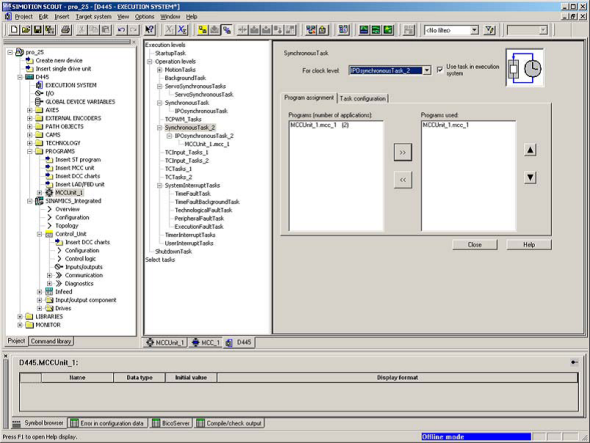
图4 执行系统任务配置界面
在任务配置的左侧可以看到执行等级树,在每个执行等级下有分配的任务和程序的列表。
给任务分配程序的步骤:
1首先选择要分配程序的任务
2选择Program assignment标签项,在左侧的窗口会列出所有可分配的程序
3在左侧的窗口选择要分配的程序
4选择  ,选定的程序出现在右边的窗口中。
,选定的程序出现在右边的窗口中。
5 在右侧窗口中选中相应的任务,按上下按钮可以调整程序的运行顺序。
6 还可以在Task configuration标签中进行更多的设置,例如
- 程序出错的处理方式
- 周期任务的看门狗时间
- MotionTasks的启动模式等
全部设置完成后,可以建立连接然后下载到目标系统中。
2.2 选择时钟信号源
在SIMOTION 硬件配置时就确定了时钟的信号源。如果SIMOTION的某个接口被设置成了等时同步 DP/PN模式,则时钟周期的设置被用做总线时钟周期。DP/PN的通讯,伺服以及插补周期均与总线时钟周期同步。如果想要等时同步地访问IO变量,必须进行此设置。支持等时同步的驱动设备有:SIMODRIVE 611U, MASTERDRIVES MOTION
CONTROL, SINAMICS。
也可以连接不支持等时同步模式的驱动,例如Micromaster MM4 和 MASTERDRIVES VC。
如果未设置等时同步模式,就可以设置基本的系统时钟。伺服和插补周期与基本的时钟同步。
2.2.1系统时钟周期
一旦选择了时钟周期的源,就可以定义各个同步的周期时间,他们是基本时钟周期的倍数。
● Bus cycle clock (DP cycle clock / PN cycle clock):系统时钟周期
● Servo cycle clock (position control cycle clock) / T1(DCC) cycle clock
输入输出在此周期内被刷新。包括轴的位置控制以及集中式IO或分布式IO的处理。伺服时钟周期与总线周期的比例可以是1:1 或2:1。
设置此周期时要注意:
- 伺服周期要设置成DP的总线时间,因此所有的DP总线的时钟周期要一致。
- 对于SIMOTION C P D,外部的DP总线周期至少为1ms
- 对于等式同步的PROFINET来说,如果设置的时钟周期比DP的周期短,例如0.5ms,那么伺服周期必须与DP的周期一致(对于SIMOTION D 包括PROFIBUS Integrated)
- 伺服周期与总线周期的比率也要在驱动设置里的应用周期中设置。 此设置对于生命周期的监控是必须的。
● Interpolator cycle clock (IPO cycle clock) / T2(DCC) cycle clock
轴运动是在IPO时钟周期内被计算。IPOSynchronousTask 也是在此周期内执行。IPO 周期与伺服周期的比率可以设置成1:1 到 1:6。
● Interpolator cycle clock 2 (IPO_2 cycle clock) / T3(DCC) cycle clock
IPO_2时钟周期可以运行低优先级的轴。此外IPOSynchronousTask_2 和PWM Task (TControl) 也在此周期内执行。
IPO_2 与 IPO 时钟周期的比率可以设置成 1:2 到 1:64。
● DccAux (DCC) cycle clock
DCCAux 时钟周期与 T3(DCC) 时钟周期的比率可以设置成1:2 到 1:32。
● DCCAux_2(DCC) cycle clock
DCCAux_2时钟周期与DCCAux 时钟周期的比率可以设置成1:2 到 1:32。
● PWM cycle clock: TControl 工艺应用相关的时钟设置
2.2.2 系统时钟周期的设置
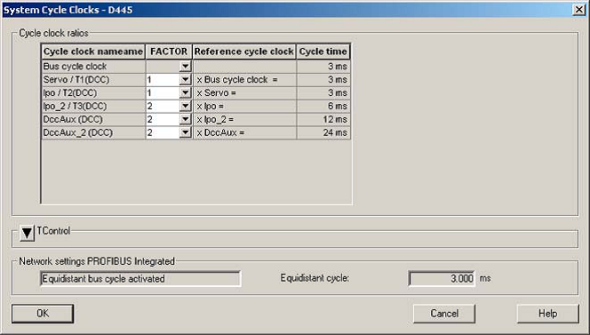
图5 系统时钟周期的设置
系统时钟周期的设置步骤:
1 通过菜单 Target system > Expert > Set system cycle clocks...,或者右击 EXECUTION SYSTEM 选择 Expert > Set system cycle clocks 打开设置页面。
2 如果没有设置等时同步模式则可以指定基本的总线时间。
PROFIBUS可能的设置:1.0…8.0
PROFINET可能的设置:
- V4.0开始带PROFINET 的SIMOTION P 和 SIMOTION D: 0.5 ... 4.0 ms
- V4.1 开始带PROFINET 的SIMOTION P: 0.25 ms 到 4 ms。
PROFIBUS 的总线时钟周期 是0.125 ms的倍数, C2xx 是0.25 ms。PROFINET是0.125ms的倍数。
3 设置各个时钟之间的比例关系。
4 如果使用了TCONTROL则需对TCONTROL系统任务以及时钟周期进行设置。
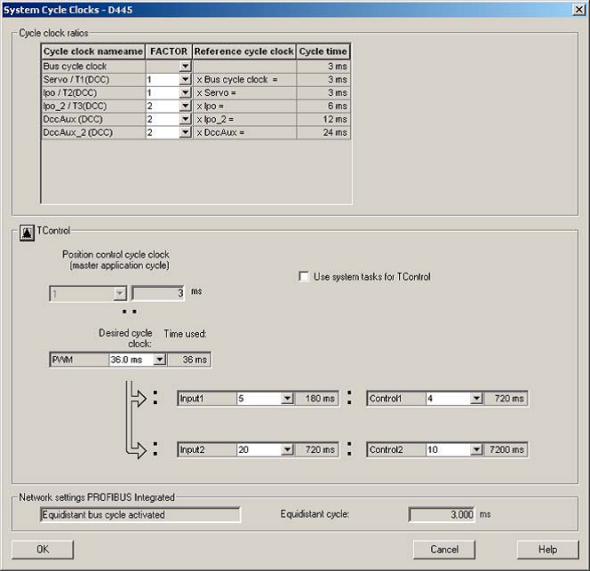
图6 系统时钟设置
2.3 给TO(工艺对象)分配系统时钟周期
可以分配TO的计算周期来改变TO的优先级以及优化系统的性能。一般情况下,可以分配低优先级的工艺对象到IPO2,例如外部编码器。分配IPO或伺服时钟周期到高优先级的TO。可以设置的时钟周期如下表。
| 运动控制任务 | 高优先级 | ... | 低优先级 |
| 工艺对象 | 伺服周期时间 | 插补时钟周期 | 插补时钟周期2 |
| Drive axis | 默认 | X | |
| Positioning axis | 默认 | X | |
| Synchronous axis | 默认 | X | |
| External encoder | 默认 | X | |
| Output cam | X | X | X |
| Cam track | X | X | X |
| Measuring input | X | X | X |
表2 工艺对象可以分配的系统时钟周期
2.4 任务运行时间
可以用任务运行时间检查系统的性能是否可以满足要求。在设备的变量Taskruntime 和 effectiveTaskruntime中可以查看任务的运行时间。Taskruntime是指任务运行的时间(不包括中断的时间),effectiveTaskruntime显示实际执行等级的执行时间,从执行等级开始到最后的任务结束所需的时间。如图所示:
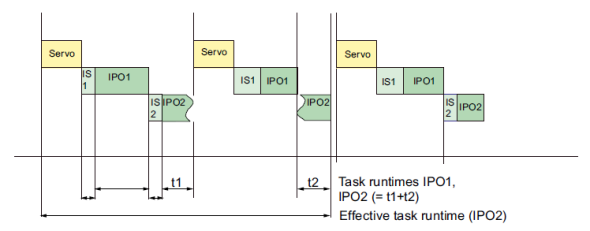
图7 任务的运行时间
图中:
Servo: 伺服循环周期
IS1: IPOSynchronousTask
IS2: IPOSynchronousTask_2
IPO1: IPOTask
IPO2: IPOTask2
系统运行时可能会发生超时或溢出。可以用SCOUT的诊断功能来监控程序的运行。
2.5 自由执行任务的时间分配
除了高优先级的用户和系统任务外剩余的时间是留给MotionTasks 和BackgroundTask的。在自由执行任务级别自由的顺序执行这些任务。由于是循环执行,因此执行时起始顺序是不确定的。在此循环中一个任务可以在指定的时间内连续执行,然后转到下一个任务,如果任务执行结束就会直接转到下一个任务,如图8所示。可以通过设置来决定MotionTasks 和BackgroundTask在自由执行任务级别中执行时间的分配。
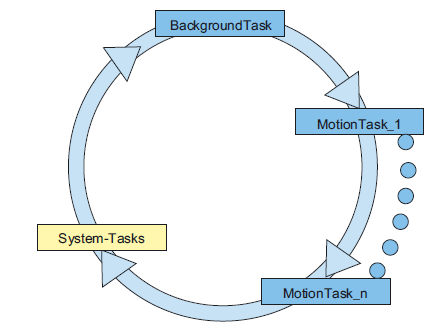
图8 自由时间分配
2.5.1 自由执行任务等级的时间分配
1. 在任务分配窗口中选择MotionTask或BackgroundTask ,选择任务配置标签。
2. 点击时间分配按钮 Time allocation.
3. 在打开的窗口中用滑动条设置BackgroundTask的时间分配。
4. 点击OK确定。
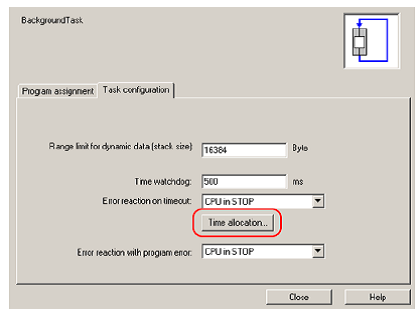
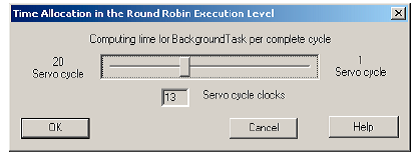
图9 时间分配
2.5.2 举例说明
通过两个例子说明自由执行等级时间的设置。
1.如果设置BackgroundTask的运行时间为1个伺服周期如下图所示。在此设置下,BackgroundTask执行一个伺服周期,然后运行所有的MotionTask,但每个MotionTask最多运行2个伺服周期。然后BackgroundTask再执行一个伺服周期。
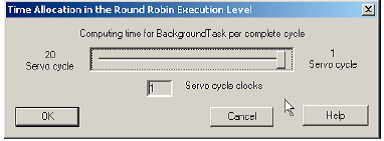
例如有两个MotionTask的情况下,自由执行等级的执行情况。

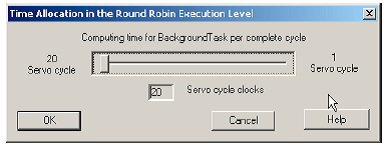
2. 如果设置BackgroundTask的运行时间为20个伺服周期如下图所示。在此设置下,BackgroundTask执行20个伺服周期,然后运行所有的MotionTask,但每个MotionTask最多运行2个伺服周期。然后BackgroundTask再执行20个伺服周期。

关键词
SIMOTION, 执行系统, 执行等级, 系统时钟


- 评论








 关联文档
关联文档
- 当 PROFIBUS DP 和 PROFINET IO 使用 SFC 58 / SFC 59 和 SFB 52 / SFB 53 进行通信时,对于激活的任务有无限制?
- DCC在S120以及Simotion中的执行任务周期
- SIMOTION系统时钟与HMI系统时钟同步
- 如何计算读入的任意数量的数值的当前平均值?
- 在 STEP 7 (TIA Portal) 软件中,当多个用户在相同时间内执行一个任务时,如何同步 S7-1500 的项目?
- 如何定义Simotion的系统循环时钟
- SIMOTION 和 S120 之间的时钟同步
- ONE_840D sl_应用_多任务复合加工整体方案
- 如何用 SFC1 (READ_CLK) 读取时间和日期以及如何用 SFC0 (SET_CLK) 设定系统时间?
- Simotion 运动控制系统介绍


隐私政策更新提示
欢迎您来到西门子数字化工业支持中心网站!我们使用cookies来确保您能最好地使用我们的网站,进行网站分析并根据您的兴趣定制内容。我们有时会与第三方共享cookie数据。继续浏览本网站,即表示您同意我们使用cookies。您亦可以参考西门子数据隐私政策以了解更多相关信息。
同意并继续浏览















扫码分享