“编码器监控扩展功能”支持以下编码器信号检测相关的功能扩展:通过参数 ......
“编码器监控扩展功能”支持以下编码器信号检测相关的功能扩展:通过参数 p0437 和 r0459 来激活“编码器监控扩展功能”。r0458.12 = 1 可显示硬件是否支持扩展的编码器监控功能。
注意
• 仅可在编码器调试方法期间对“编码器监控扩展”的功能进行参数设置。在运行期间不能修改其相关参数!
• 相关功能的参数设置只能通过 STARTER的专家列表进行修改。
• 如下功能适用于 SMC30 模块和采用内部编码器检测的控制单元,针对信号波形如图1所示的HTL、TTL方波编码器。
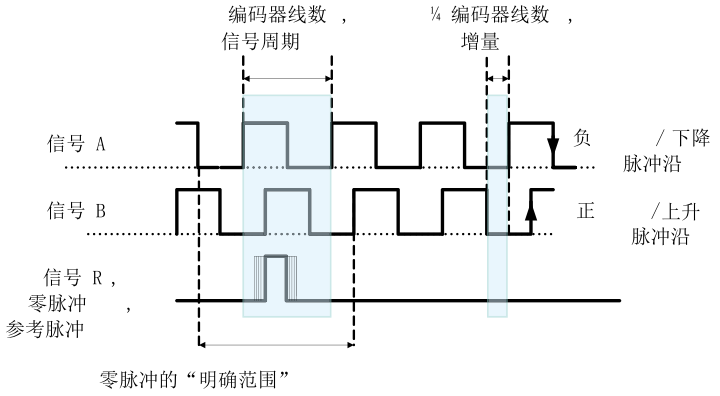
图1 HTL、TTL信号波形图
1 编码器信号监控 Encoder track monitoring
此功能在使用推挽信号的方波编码器中监控编码器信号 A/B ↔ -A/B ,以及 R ↔ -R。编码器信号监控用于检测最重要的信号特性,如:振幅、偏移、相位。
1.1 调试方法
激活编码器信号监控功能必须设置以下参数:
• p0404.3 = 1 ,切换到方波编码器
• p0405.0 = 1 ,切换到双极性信号
设置 p0405.2 = 1 以激活编码器信号监控功能。
若已从参数 p0400 的列表中选择了编码器,则p0405.2 = 1 上述为预设值且无法进行修改。若自行配置编码器参数,可以在图2中找到p0405.2参数。
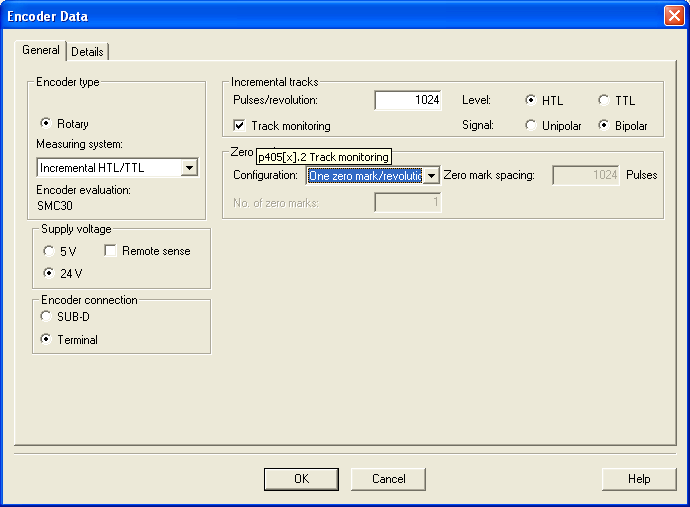
图2 激活编码器信号监控功能
1.2 取消信号监控
在编码器信号监控激活时,可设置 p0437.26 = 1 取消激活此功能。对所有信号监控都可单独进行计算。此时即可使用 HTL 编码器,也可使用 TTL 编码器。识别出故障时会输出故障信息 F3x1171),故障信号以位编码记录在故障值中。
注意
在 CU310-2 、 CUA32 、 D410-2 和 SMC30 (仅订货号为 6SL3055-0AA00-5CA0 和
6SL3055-0AA00-5CA1 )模块中连接了无 R 信号的方波编码器,则会在激活信号监控时输出F3x1171) 故障。
为了避免此故障,必须在编码器接口上将“编码器电源接地”(引脚 7 )和“参考信号 R”(引脚 10 )相连,并将“编码器电源”(引脚 4 )和“反向参考信号 R”(引脚 11 )相连。
2 脉冲信号沿有效 Signal edge evaluation( 1 x , 4 x )
“脉冲信号沿有效”功能让驱动器可以使用加工公差较高的方波编码器或者较旧的编码器。使用此功能可在编码器信号脉冲负载系数不均匀的脉冲编码器上计算出较为“平稳”的转速实际值。从而在设备更新时便可保留旧电机以及旧编码器。
2.1 调试方法
• 设置如下参数p0437位4和位5以激活“脉冲信号沿有效”功能。
| p0437.4 | p0437.5 | 有效计算 |
| 0 | 0 | 4 x (工厂设定) |
| 0 | 1 | 保留 |
| 1 | 0 | 1 x |
| 1 | 1 | 保留 |
表1 激活脉冲信号沿有效功能
2.2 工作原理
在4 x(4 倍)计算中,会对A信号和B信号上一对脉冲的两个上升沿和两个下降沿分别进行计算。在1 x(1倍)计算中,只会对A信号和B信号上一对脉冲的第一个或最后一个脉冲沿进行计算。
与1 x计算相比,4 x计算可以检测的最小速度是1 x计算的四分之一。但在编码器A B 脉冲信号偏差非90°的增量编码器中,4x 计算可能会导致转速实际值的“不稳定”。
下列公式描述了不等于0的最小转速:
n_min = 60 / (x*p0408) [rpm] 其中 x = 1 或 4 ( x 为计算次数)
3 “0”转速检测时间的设置 Setting the measuring time to evaluate speed "0"
此功能适用于低速(额定转速40转/分钟以下)时,正确反馈接近于0的实际转速。这样可避免驱动系统在静止状态下速度控制器的积分( I )分量缓慢增加,从而产生不必要的转矩。
调试方法
• 在参数 p0453 中输入所需的测量时间:若在此时间内未识别出 A/B 信号的脉冲,则反馈的转速实际值为“0”。
4 转速实际值的滑动平均值计算 Sliding averaging of the speed actual value
在使用低速电机(< 40 rpm)和每转脉冲个数为 1024 的标准编码器时会碰到问题:每个电流控制器的时钟周期中检测到的编码器脉冲数量并不完全相同(p0430.20 = 1:不采用脉冲沿间隔时间计算转速,采用增量差值法计算转速)。检测到的编码器脉冲数量的不同会导致转速实际值的跃变,尽管编码器以恒定转速运行。
调试方法
• 设置参数 p0430.20=0 (工厂设置:脉冲沿间隔时间计算转速)用于计算滑动平均值。
• 在参数 p4685 中输入电流控制器的时钟周期的数量,通过此数值计算转速平均值。通过求平均值可根据给定的周期数量对偶发的故障脉冲进行平滑。p4685最大可以设置到20,即对20个电流控制器的时钟周期中检测值取平均,作为转速实际值。
5 零脉冲容差 Zero mark tolerance
在此功能用于忽略与两个零脉冲之间与检测到的编码器脉冲个数相关的偶发故障。
5.1 调试方法
设置参数 p0430.21 = 1,以激活“零脉冲容差”功能。
5.2 工作原理
• 在检测到第2 个有效零脉冲后,“零脉冲容差”功能开始生效。
• 此后两个零脉冲间的脉冲数量首次与所配置的脉冲数量(旋转编码器 p0425、直线编码器 p0424 )出现不一致时,先不会输出F3x100 1)(零脉冲间脉冲个数错误)或 Fx31011) (零脉冲标记故障),而是会先输出报警A3x4001) (零脉冲间脉冲个数报警)或 A3x4011) (零脉冲标记报警);
• 若下一个零脉冲重新在正确的位置出现,则消除报警。
• 若再次识别出错误的零脉冲位置,则会输出故障 F3x100 1) 或Fx31011) 。
6 冻结转速原始值 Freezing the speed raw value
若在反馈的转速实际值变化率较大的情况下,dn/dt 监控报出了故障(见参数 p0492 参数说明)。此时可通过“冻结转速原始值”功能在短时间内将反馈的转速实际值信号设为某一固定值,从而对转速实际值的变化进行均衡。
6.1 调试方法
设置参数p0437.6 = 1,以激活“冻结转速原始值”功能。
6.2 工作原理
• 若 dn/dt 监控作出了响应,则系统首先会输出报警 A3x4181) “编码器 x :超出了每个采样率的转速差值”,而不是F3x1181) 故障。
• 此时冻结转速实际值,冻结时间为2个电流控制器的时钟周期。
• 转子位置继续累加。
• 在 2 个电流控制器的时钟周期后会解除速度实际值冻结。
7 可调节的硬件滤波器 Adjustable hardware filter
7.1 调试方法
设置参数 p0438 ≠ 0,以激活“可调节的硬件滤波器”功能。
7.2 工作原理
• 在参数 p0438 (方波编码器滤波时间)中输入一个在 0 至100 μs范围内的滤波时
间。硬件滤波器仅支持0 (无滤波)、0.04 μs 、0.64 μs 、2.56 μs 、10.24 μs 和
20.48 μs 这些赋值。若输入的数值不是上述固定值时,则会自动将硬件滤波时间r0452设置成比之较大的接近值。p0438设置为10.24 μs以上时,r0452会自动设定为20.48 μs。
• 激活生效的滤波时间可在参数 r0452 中查看。
• 滤波时间会对电机允许运行的最大转速有影响,其计算方法如下:
n_max [rpm] = 60 / (p0408 · 2 · r0452) ; p0408:旋转编码器的脉冲数。
示例
若p0408 = 2048 、r0452 = 10.24 [μs] ;
此时 n_max = 60 / (2048 · 2 · 10.24 · 10-6) = 1430 [rpm]
也就是说,使用此滤波时间内电机的最大运行转速可达1430 rpm ,超过此速度运行则正常的编码器脉冲信号也会被滤除掉,造成设备故障停机。
8 零脉冲沿有效 Edge evaluation of the zero mark
此功能适用于零脉冲宽度 ≥ 1个脉冲宽度的编码器。此类编码器在使用时激活零脉冲边沿监控会引发故障。
当正向旋转时检测零脉冲的上升沿,反向旋转时检测其下降沿。这样便可将零脉冲宽度大于一个脉冲的编码器当作等距零脉冲编码器( p0404.12 = 1 )进行参数设置,也就是说此时可以激活零脉冲监控,系统不会误报F3x100, F3x1011) 。
8.1 调试方法
• 设置参数 p0437.1 = 1 以激活“零脉冲沿有效”功能。出厂设置 p0437.1 = 0表示运行时激活零脉冲监控。
8.2 工作原理
• 在极端情况下,若电机以1转速度在零脉冲宽度范围内摆动,零脉冲宽度监控可能会出现数量级上的错误。
• 上述问题可通过对参数“p4686 零脉冲最小长度”赋值来解决。可将参数 p4686 设为零脉冲宽度的¾ ,以尽可能地减少上述错误。
• 为了能在有稍许不精确时,驱动设备不会输出故障 F3x100 (N, A) 1) “编码器 x :零脉冲间脉冲个数故障”,可以允许调节零脉冲间脉冲个数的偏差:
“p4680 允许零脉冲监控公差”在设置了 p0430.22 = 0 (无磁极位置适配)和 p0437.2 = 0 (故障时不进行脉冲数量补偿)时,此参数可减少故障 F3x100 1) 的触发几率。
9 故障时的脉冲数补偿 Pulse number correction for faults
干扰电流或其他 EMC 问题可能会使编码器检测的结果出现偏差。此时可以通过零脉冲对所测得的编码器信号进行补偿。
9.1 调试方法
• 设置 p0437.2 = 1 以激活“故障时的脉冲数补偿”功能。
• 用零脉冲间脉冲个数( p4680 )参数定义允许的公差(编码器脉冲个数)。
• 用参数p4681 ,p4682 定义驱动设备中脉冲数量补偿的公差带范围。
• 通过 p4686 定义零脉冲的最小宽度。
9.2 工作原理
此功能用于在公差带内( p4681 , p4682 )对两个零脉冲间错误的编码器脉冲进行完全补偿。补偿速度为每个电流控制器的时钟周期最多可以补偿编码器脉冲个数的¼。这样便可对缺少的编码器脉冲(例如由于编码器码盘脏污)进行持续补偿。p4681设置正向偏差上限脉冲个数,p4682设置负向偏差上限脉冲个数。若检测到两个零脉冲偏差超出了公差带,则会输出故障 F3x131 1) 。
• 通过p4686 设置零脉冲的最小长度。采用出厂设置1 可防止 EMC 问题导致零脉冲故障。仅在设置参数 p0437.1 = 1 “零脉冲沿有效”时,才可以在小范围内抑制的零脉冲故障。
• 若零脉冲偏差小于零脉冲最小长度( p4686 ),则不会进行补偿。
• 零脉冲持续出错的情况下会显示故障 F3x1011) 或报警A3x4011) 。
注意:
在“带零脉冲的换向”功能激活时 (p0404.15 = 1) ,系统会等待精同步完成后( r1992.8 = 1 )才进行补偿。
对用于换向用的磁极位置同样也会进行补偿。 因此不必激活磁极位置适配( p0430.22 = 1 )功能。 在转速检测中此功能不会执行补偿。
10 磁极位置适配 Pole position adaptation
驱动通过不断重复零脉冲在磁极位置中添加所缺少的脉冲(例如在编码器码盘脏污的情况下),从而对磁极位置中的错误进行补偿。如果添加的脉冲过多(例如由于EMC干扰),则在超出零脉冲间脉冲个数范围后其会自动减少。
10.1 调试方法
• 设置参数 p0430.22 = 1 以激活“磁极位置适配”功能。
10.2 工作原理
“磁极位置适配”功能激活时,会在用于换向的磁极位置中对 A/B 信号上的错误脉冲进行补偿。 零脉冲的公差带为 ±30°电角度。 补偿速度为两个零脉冲间编码器脉冲的¼ ,这样便可对个别错误脉冲以及多余的脉冲进行补偿。 1) x = 编码器编号( x = 1 、 2 或 3 )。
11 编码器故障排除 Troubleshooting
| 编码器信号故障图 | 可能故障描述 | 解决方法 |
| 无故障 | 无 |
| F3x101, 零脉冲标记故障 | 检查接口分配是否正确(是否将A 与–A 混淆,或 B 与–B 混淆) |
| 零脉冲信号受到干扰,F3x100 (零脉冲距离出错) | 检查接口分配是否正确(是否将R和–R混淆);使用使用“零脉冲容差”功能 |
| 零脉冲信号或编码器脉冲信号受到干扰 | 使用“零脉冲容差”功能或“故障时的脉冲数补偿”功能 |
| 零脉冲过宽 | 使用“零脉冲沿有效” |
| EMC故障 | 使用“可设置的硬件滤波器” |
| 零脉冲过早 / 过晚 ( A/B 信号上存在干扰脉冲或脉冲损失) | 使用“故障时的脉冲数补偿”功能及“磁极位置适配” |
表2 编码器信号故障图、可能故障原因及解决方法
关键词
S120,编码器,监控
您可以前往全球资源库查看此文档


















 西门子官方商城
西门子官方商城












 关联文档
关联文档

















扫码分享