本文介绍了用于温度控制的PID功能块FB58的基本使用,包括程序调用、参数含义等,并就常用的控制带、脉冲输出功能进行的详细描述。在此基础上介绍了控制器整定的基本过程以及具体的参数含义。
1 FB58基本特性介绍
在标准库(Libraries/Standard Library/PID Control Blocks)中的PID控制块中提供了两个用于温度控制的功能块FB58和FB59。其中,FB58用于具有连续或脉冲输入信号的执行器的温度控制器,而FB59用于类似于定位电机的执行器的步进温度控制器。除了基本的功能之外,FB58还提供PID的参数自整定功能。
PID功能块是纯软件控制器,相关运算数据存放在相应的背景数据块中,对于不同的回路,应该使用不同的背景数据块,否则会导致PID运算混乱的错误。
FB58可以用在仅加热的温度控制回路(例如控制蒸汽的供给量来控制温度),也可以用在仅冷却的温度控制回路(例如控制冷却风扇的频率、或者冷媒的供给量来控制温度)。如果用于冷却,则回路工作在反作用状态,则需要给比例增益参数GAIN分配一个负数,其他保持不变。
和常规PID功能块(例如FB/SFB41)对比,FB58具有如下特性:提供控制带(Control Zone)功能;控制输出提供脉冲方式;过程值转换增加对温度信号转换(PV_PER*0.1/0.01)方式的支持;参数保存和重新装载;控制器参数自整定功能;设定值变化时的比例作用弱化功能。
2 FB58基本使用
2.1 功能块调用
在STEP 7中,提供了关于FB58和FB59的一个示例项目,其路径如下图所示:

图1 FB58/59示例项目
该示例项目包含有如下几个示例程序:
(1)连续控制器Continuous controller
输出类型是连续数值的一类控制器,其中的FB100和DB100是一个模拟的控制对象;
(2)脉冲控制Pulse control OB35, OB1
输出类型是单个脉冲信号的一类控制,在OB35和OB1中同时调用,其中的FB102和DB102是一个模拟的接收脉冲信号的控制对象;
(3)脉冲控制Pulse control OB35, OB32
输出类型是单个脉冲信号的一类控制,在OB35和OB32中同时调用,其中的FB102和DB102是一个模拟的接收脉冲信号的控制对象。和上一个项目不同,这个项目要求运行的CPU能够支持OB32定时中断,例如S7-400 CPU;
(4)脉冲控制器 Pulse controller
输出类型是单个脉冲信号的一类控制,只在OB35中调用,其中的FB102和DB102是一个模拟的接收脉冲信号的控制对象。和前面两个项目不同,这个项目只在OB35中调用一次FB58即可;
(5)步进控制器 Step controller
输出类型是两个脉冲信号的一类控制,只在OB35中调用,其中的FB101和DB101是一个模拟的控制对象,例如步进电动阀门。这是一个FB59的应用示例。
通过示例项目可以测试FB58的各项功能。在具体的编程过程中,可以从示例项目中将相关功能块、组织块、背景数据块拷贝过来,也可以直接编程调用。
在STEP 7中创建一个OB35,打开并在其中添加FB58:

图2 调用FB58
如上图所示,在左侧的总览列表中,依次进入“Libraries”“Standard Library”“PID Control Blocks”,在其中拖拽FB58到右侧编程窗口中。填写一个背景数据块(例如DB58),由于是新建的一个DB块,软件会弹出如下窗口:
图3 生成背景数据块
点击“Yes”即可生成一个用于FB58的背景数据块。
在块(“Blocks”)中找到刚生成的DB块,双击打开:
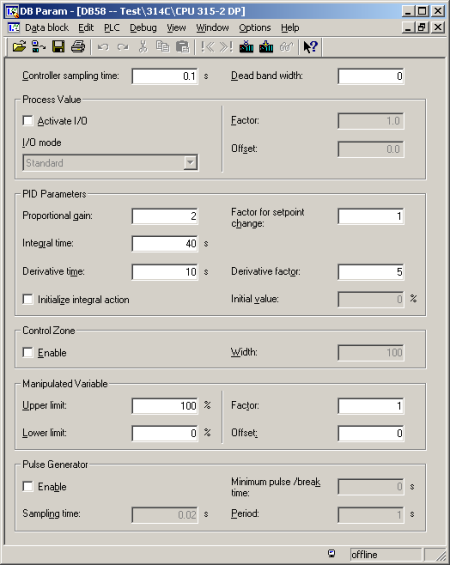
图4 背景数据块
在背景数据块中可以直接修改相关的控制参数,然后点击工具栏上的按钮  来下载参数。如果需要查看更加具体的参数信息,可以切换到数据视图:
来下载参数。如果需要查看更加具体的参数信息,可以切换到数据视图:
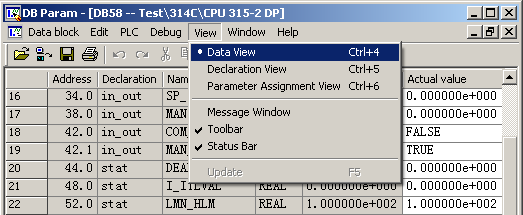
图5 切换到数据视图
在数据视图中,可以点击工具栏上的 来进行在线监控。
来进行在线监控。
2.2 过程值的处理
在FB58中,对模拟量的处理遵照如下流程图:
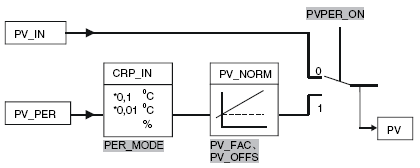
图6 过程值处理流程
如图中所示,FB58提供有两个过程值的输入通道:PV_IN和PV_PER,这两个通道用PVPER_ON来选择:
表1 PVPER_ON参数
| PVPER_ON | 过程值输入 |
| True | 模拟量输入通道的数值直接从PV_PER输入 |
| False | 过程量以浮点型数据从PV_IN输入 |
注:PVPER_ON的默认值为False。
对于PV_PER的输入,根据温度测量方式的不同,从模拟量输入通道过来的数据格式也有所不同,因此,FB58提供过程值格式转换的环节CRP_IN,其中涉及到参数PER_MODE:
表2 PER_MODE参数
| PER_MODE | 转换方式 | 模拟量输入类型 | 单位 |
| 0 | PV_PER*0.1 | 热电偶、热电阻:标准型 | ℃/℉ |
| 1 | PV_PER*0.01 | 热电阻:气候型 | ℃/℉ |
| 2 | PV_PER*100/27648 | 电压/电流 | 百分数% |
注:PER_MODE的默认值为0。
从图1中的处理流程中可以看到经过CRP_IN之后,还有一个规格化(Normalize)的环节PV_NORM。该环节可以对过程值进行修正,对于温度值,可以规格化为百分比值,同样地,百分比的值也可以规格化为温度值。
其转换公式是:
PV_NORM的输出 = CPR_IN的输出*PV_FAC+PV_OFFS
例如,通过温度变送器将一个-200℃~1000℃范围里的温度值以4~20mA的信号送至模拟量输入通道PIW256中。在FB58中设置
PV_PER = PIW256PVPER_ON = TRUEPER_MODE = 2PV_FAC = 1.2PV_OFFS = -200.0
通过如上的参数设置,则在“PV”参数中得到一个温度值。同样地,此时的设定值SP_INT可以直接设置为温度值。
设定值SP_INT的取值由过程值的处理过程所决定,如果过程值经过处理得到一个百分比的值,那么SP_INT就是一个量程的百分比;如果处理得到一个实际温度值,那么设定值SP_INT也必须是一个温度值。SP_INT必须要有和过程值一样的基本单位。
2.3 PID运算
PID运算是FB58的运算核心,主要通过对偏差信号(设定值SP_INT-过程值PV)进行比例、积分、微分运算来得到对阀门、变频器等执行机构的控制信号。具体流图如下图所示:
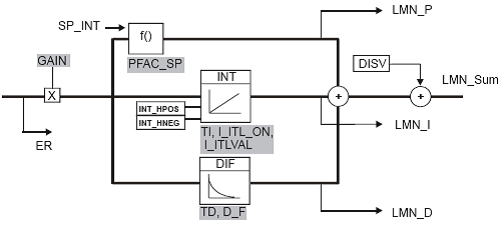
图7 PID运算流程
从上述流程图中有如下几点信息:
- 比例、积分和微分都是对比例和增益参数的乘积之积的运算,其在时间域上的表达式为:

- 特殊地,在积分时间TI和微分时间TD为0的时候,积分作用和微分作用被取消激活,此时为纯比例控制;
- 对于反作用方式,需要将增益GAIN设置为负数;
- PFAC_SP为比例弱化功能。在设定值SP_INT发生阶跃变化时,设置比例因子PFAC_SP,从而达到减弱因为设定值修改而导致的不稳定,该比例因子PFAC_SP的取值范围是0.0~1.0;
- 对于积分作用,在I_ITL_ON为1的时候,积分结果就是I_ITLVAL;
- 积分功能中的INT_HPOS和INT_HNEG参数为正向积分功能保持和反向积分功能保持,如果此时偏差ER和增益GAIN的乘积为正,且INT_HPOS为True,那么此次运算周期中积分的增加量为0,即积分项LMN_I的输出不会改变。INT_HNEG的作用与此类似。
- 微分功能中的D_F参数是微分因子,在微分运算中和周期时间CYCLE作用类似。
2.4 手动/自动切换
FB58的手动/自动切换是通过参数MAN_ON来完成的,在MAN_ON为True的时候,PID处在手动工作状态,此时,手动值通过参数MAN给出。

图8 控制输出
默认情况下,LMN_HLM和LMN_LLM分别是100.0和0.0,从上图中可以看出,手动值的有效数值范围也应该是0.0~100.0。
在参数MAN_ON为False的情况下,PID投入运行,控制回路处于自动工作状态。
为了降低手动/自动切换过程中扰动,算法通过如下措施来实现无扰切换:
- 在自动的状态下,比例和积分的运算结果之和会写入到单元MAN中,这样在由自动切换到手动的过程中不会引起控制输出波动;
- 在手动的状态下,积分项的输出等于MAN的值减去比例项的值(偏差ER*增益Gain),而在自动状态中,积分项是一个累计的结果,这样在切换到自动状态时积分项不会有太大的突变。
从上面的分析可以知道,FB58已经集成了相应的无扰切换的功能,不需要编写额外的程序来实现。
2.5 保存和重新装载参数
保存和重新装载控制器参数是FB58中的新功能,主要用来实现在多套参数之间的切换。
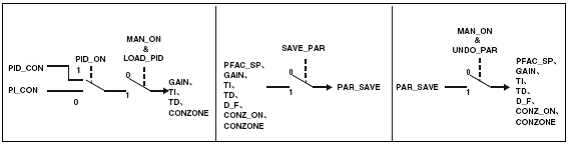
图9 控制参数保存和重新装载
从上图中可以看出,控制参数的处理有三种方式:
(1)从PID_CON/PI_CON中装载
要实现此装载,必须满足如下几种条件:
手动控制状态(MAN_ON=True);
PID_CON.GAIN或者PI_CON.GAIN不为0;
LOAD_PID为1
如果参数PID_ON为1,则从PID_CON中装载如下参数:
GAIN、TI、TD,并计算CONZONE=250.0/GAIN
如果参数PID_ON为0,则从PI_CON中装载如下参数:
GAIN、TI、TD,并计算CONZONE=250.0/GAIN。特殊地,此时会关闭控制带功能,即设置CON_ZONE参数为0,并让微分参数TD设置为0.0。
装载完成之后,参数LOAD_PID会自动复位。
值得注意的是,如果PID_CON中保存的增益参数PID_CON.GAIN为0,则自动会修改PID_ON为0,并转而从PI_CON中获取参数。
注:PID_CON/PI_CON中的参数来自于自整定过程。
(2)保存参数
保存参数可以在任何工作状态下进行,只需设置参数SAVE_PAR为1即可。可以将如下参数保存找PAR_SAVE结构体中:
PFAC_SP、GAIN、TI、TD、D_F、CONZ_ON、CON_ZONE
在保存结束之后,参数位SAVE_PAR会自动复位。
(3)重新装载参数
重新装载是“保存参数”的逆过程,但其执行是需要条件的:
手动控制状态(MAN_ON=True);
PAR_SAVE.GAIN不为0;
参数UNDO_PAR为1。
在重新装载完成之后,参数UNDO_PAR会自动复位。
3 高级功能
3.1 控制带
温度控制回路是一个有明显滞后特性的对象,这给实际的调节过程带来了很多的问题,最显著的困难就是在过程值偏离设定值较大时,调节过程过于缓慢,而在接近设定值时容易出现较大的超调。
从上述的两个问题出发,PID应该满足这样的功能:
- 在偏差超过一定的范围时,PID输出最大或者最小的调节量,让温度值快速回到一个小的范围中,以缩短回路的调节时间;
- 在设定值附近时,越靠近调节量变化越小,以防止超调。
为此,FB58提供了一个“控制带(Control Zone)”功能,其工作原理是这样的:
- 当过程值PV大于设定值SP_INT,且偏差的绝对值超过CON_ZONE,则以输出下限LMN_LLM作为输出值;
- 当过程值PV小于设定值SP_INT,且偏差的绝对值超过CON_ZONE,则以输出上限LMN_HLM作为输出值;
- 如果偏差的绝对值小于CON_ZONE,则以实际PID的计算结果作为输出值。

图10 控制带(正作用情况下,即GAIN>0.0)
默认参数中LMN_LLM是0.0,LMN_HLM是100.0,控制带使能位CONZ_ON是False,控制带范围是100.0。
如上图所示的控制带解决了在偏差较大时PID调节过于缓慢的问题,但在控制带范围中要避免因大滞后导致的超调,需要弱化PID的输出,要实现这个功能,可以通过降低比例参数和增加微分作用。在同样的偏差情况下,比例增益越小,PID输出变化越缓慢。微分作用简单来看就是通过偏差的变化量来调节,在接近设定值的过程中,温度变化速度在逐步变慢,此时的微分作用可以起到弱化控制输出的功能,进而达到减少超调的目的。因此,推荐控制带在有微分作用的前提下使用。参数装载的过程也体现了这一点:
- 如果是装载PI_CON下的参数,因为没有微分功能,所以会设置CONZ_ON为False。
在使用过程中,控制带参数CON_ZONE应该始终设置为一个大于等于0.0的值,否则会导致PID运算结果永远不会被执行的故障现象。
3.2 脉冲输出方式
和FB41不同,FB58中集成有脉宽调制输出的功能,通过将PID的运算结果换算成对应的脉冲占空比来达到加热/冷却的控制。
在FB58的脉冲输出环节中涉及到的关键参数有:
PULSE_ON:脉冲输出使能;
PER_TM:输出脉冲的周期时间;
CYCLE_P:脉冲输出的刷新时间,推荐PER_TM/CYCLE_P>50,即将周期时间分为时间长度为CYCLE_P的“片”,在每个CYCLE_P时间间隔里,脉冲输出单元运算一次以判断下一个CYCLE_P中应该输出高电平还是低电平,PER_TM和CYCLE_P的比值越大,说明输出脉冲的精度就也高;
P_B_TM:最小脉冲/最小断开时间。例如当PID的计算输出接近于100.0时,那么输出的脉冲中低电平时间接近于0,针对执行机构而言,其需要在极短的时间里关断,然后再打开,这会严重缩短设备的工作寿命,为此,通过设置最小脉冲断开/脉冲时间就可以避免此问题。当需要输出的高电平时间小于P_B_TM时,则不会输出这个高电平;当需要输出的高电平时间大于周期时间PER_TM-P_B_TM时,则整个周期都输出高电平。P_B_TM设置的过长,可以降低对执行机构的冲击,但会影响输出脉冲和整个回路的控制精度;设置的过短,则对执行机构不利。

图11 脉冲输出
如上图所示,LmnN为PID的运算结果,通过和脉冲周期时间PER_TM相乘得到高电平的输出时间:
脉宽=LmnN*PER_TM/100
脉冲输出单元每次执行都累加一个CYCLE_P,通过判断累加值和脉宽,或者和周期与脉宽差值的比较来改变输出点的状态。
3.2.1 脉冲输出和PID运算
在FB58中,脉冲输出和PID计算是两个相对独立的过程,各自有自己的计算周期。对于PID计算来说,CYCLE参数可以看成是PID计算的循环周期时间,例如PID在OB35每次执行过程中都会被调用,而硬件组态过程中OB35的周期时间被设置成了500ms,则CYCLE应该填写为0.5。对于脉冲输出来说,其循环周期时间是CYCLE_P。这两个时间参数可以一样,也可以不一样。PID的计算周期主要由被测量的变化规律决定的,而脉冲输出的CYCLE_P参数由要求的脉冲输出精度决定。
为了协调PID和脉冲输出之间的矛盾,FB58提供了“SELECT”参数,其具体使用如下所示:
表3 SELECT的参数配置
| 应用 | 块调用 | 功能 |
| 缺省状况:在S7-300和S7-400中,脉冲发生器采样时间不是特别短(例如,CYCLE_P=100毫秒) | 在周期性中断OB中通过SELECT=0进行调用 | 在同一个周期性中断OB中执行控制程序段和脉冲输出 |
| 在S7-300 中,脉冲发生器采样时间较短(例如,CYCLE_P=10毫秒) | 在OB1中通过SELECT=1执行条件调用(QC_ACT=TRUE) | 在OB1中执行控制程序段 |
| 在周期性中断OB中通过SELECT=2进行调用 | 在周期性中断OB中执行脉冲输出 |
| 在S7-400中,脉冲发生器采样时间较短 (例如,CYCLE_P=10毫秒) | 在低速周期性中断OB中通过SELECT=3进行调用 | 在低速周期性中断OB中执行控制程序段 |
| 在高速周期性中断OB中通过SELECT=2进行调用 | 在高速周期性中断OB中执行控制程序段 |
根据上表描述,FB58的调用可以有如下三种情况:
(1)SELECT=0,FB58只在周期中断OB(例如OB35)中调用
此时的参数配置应该将CYCLE_P和周期中断OB的中断时间保持一致。因为PID计算的执行条件是CYCLE_P的累计值和CYCLE参数一致,而脉冲输出周期PER_TM则应该CYCLE_P的整数倍,和CYCLE无关。
例如,在OB35中调用FB58,OB35的周期时间为50ms,FB58中的CYCLE_P是0.05s,CYCLE是1.0s,PER_TM是3.0s。
观察参数之间的关系,CYCLE是CYCLE_P的20倍,即OB35每20个周期执行一次FB58里的PID计算,而输出的脉冲周期是3秒钟。
(2)FB58分别在OB1和周期中断OB(例如OB35)中调用
在两个OB块中调用的FB58使用同样的背景数据块和参数,只是SELECT参数有所不同,在OB1中调用,SELECT设置为1;在周期中断OB中调用,SELECT设置为2。为了缩短OB1执行时间,可以通过FB58背景数据块中的“QC_ACT”来选择是否执行FB58,当QC_ACT为TRUE时,执行,否则跳过。
在这种方式下,处理原理同(1)一致,不同的是PID运算总是在OB1中执行罢了。OB1的执行周期对PID运算、脉冲输出均没有影响。
(3)FB58在两个不同周期时间的周期中断OB(例如OB32和OB35)中调用
FB58分别在两个周期中断OB中调用,其中周期时间长的OB中调用的FB58的SELECT参数设置为3,时间短的设置为2。
同前面两种情况不一样,SELECT选择为3时,PID的运算只和调用周期有关。例如OB32定义的周期时间是1000ms,OB35的周期时间是100ms,CYCLE_P是0.02s,PER_TM是1.0s。这样在OB32中定义SELECT参数为3,则每1秒钟就执行一次PID运算,并不是由CYCLE和CYCLE_P的关系来决定。
3.2.2 参数设置的经验法则
前面的描述说明了CYCLE/CYCLE_P/PER_TM之间的关系,对于具体的参数设置,可以有如下几条法则:
(1)CYCLE时间不能超过积分时间TI的10%;
(2)为了保证控制精度,脉冲周期时间PER_TM应该至少是CYCLE_P的50倍;
(3)脉冲周期时间CYCLE不能超过积分时间TI的5%。
4 自整定功能
FB58的背景数据块中集成了控制器参数整定的功能,打开DB块,点击工具栏的 按钮,使DB块在线:
按钮,使DB块在线:

图12 背景数据块的参数分配视图的在线
背景数据块在线之后,可以看到,相关的参数均能读取。点击菜单项“Options”下的“Controller Tuning...”,即可开始整定:

图13 选择控制器整定菜单
控制器整定的向导一共有5步,第一步是简单的功能介绍:
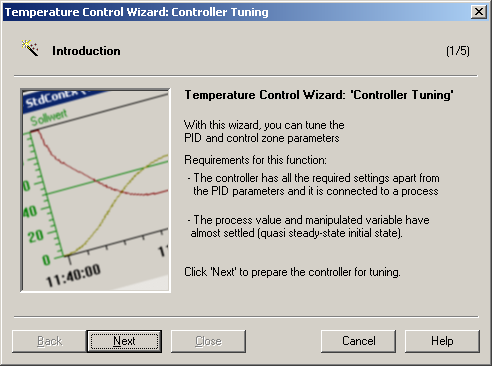
图14 功能介绍
点击“Next”,进入下一步:
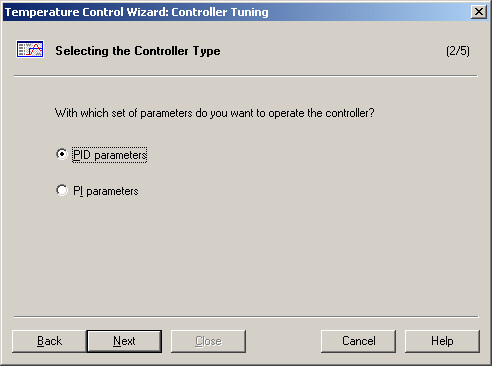
图15 控制器类型选择
在该窗口中选择是PID控制还是PI控制,该选项对应“PID_ON”参数,如果选择“PID parameters”,则在点击“Next”之后,PID_ON会置位。

图16 整定激励方法选择
FB58提供两种整定激励,一种是修改设定值,接近工作点(Tune by approaching the operating point with a setpoint step change),另一种是没有设定值阶跃变化,只在工作点整定(Tune at the operting point by setting a start bit)。
选择第一种,然后点击“Next”:

图17 修改设定值下的激励参数
选择修改设定值的激励方式,则需要在上图所示的窗口中填写新的设定值和手动值偏差,其中的手动值偏差对应的就是参数TUN_DLMN。默认情况下,设定值是当前DB块中的实际设定值,所以要触发整定,必须修改这个设定值!
这种修改设定值的激励方式的工作原理如下图所示:

图18 修改设定值的激励方式
寻找拐点是整定过程中的关键,如果设定值的阶跃变化过小,则可能在过程值(图中虚线)变化过程中不会出现拐点;相反地,如果设定值的阶跃变化过大,则可能会造成大的超调,对系统不利。
如果选择没有设定值阶跃变化的整定方式,则激励参数是这样的:
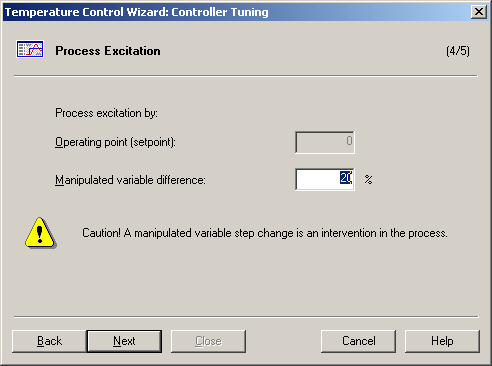
图19 无设定值阶跃变化下的激励参数
对比两种窗口,可以发现在无设定值阶跃变化的方式下,设定值是不可设的,而且手动值偏差也是默认为20%。这种方式下的整定按照如下图所示的流程:

图20 无设定值阶跃变化的激励方式
从上图中可以清楚地看到,整个整定过程中,设定值并没有发生改变,只是输出值LMN有一个变化量TUN_DLMN,在这个变化量的促使下,过程中出现波动,等检测到拐点之后,变化量消失,系统重新恢复到设定值上来。
不论哪一种激励方式,在完成配置后点击“Next”,都是开始控制器整定:

图21 控制器整定过程
整定过程分为7个阶段,从参数PHASE的值中可以读出,不同阶段的工作内容有所不同:
表4 整定阶段
| PHASE | 描述 |
| 0 | 无整定 |
| 1 | 检查参数、等待激励、测量采样时间 |
| 2 | 检测过程值上的拐点 |
| 3 | 过程参数的计算,保存整定前的参数 |
| 4 | 控制器设计 |
| 5 | 处理新的调节量 |
| 7 | 检测过程类型 |
注意,整定过程没有阶段6。
整定过程中的状态在变量STATUS_H中显示,具体错误代码对应的含义如下表所示:
表5 整定状态代码
| STATUS_H | 描述 |
| 0 | 没有新的控制器参数 |
| 10000 | 整定已结束,并得到合适参数 |
| 2xxxx | 使用估计值找到的控制参数。检查控制响应或检查STATUS_H诊断消息,并重复整定。 |
| 3xxxx | 发生操作员输入数据错误。检查诊断信息,并重复整定 |
具体的错误信息可以查看相关手册。
除了STATUS_H之外,从参数STATUS_D中可以显示出整定到的系统类型,具体的参数数值和系统类型的对应关系,请参看具体手册描述。
如果整定顺利完成,即STATUS_H为10000,优化得到的PID参数会自动写入到相应单元中,原有的参数会自动保存到PAR_SAVE的结构体中。在图10中如果选择为“PID parameters”,那整定得到的参数同时还会保存到PID_CON结构体中,同样地,选择为“PI parameters”,则会保存在PI_CON中。
5 背景数据块
如下是FB58常用参数表:
| 序号 | 名称 | 类型 | 数据格式 | 初始值 | 注释 |
| 1 | PV_IN | 输入 | REAL | 0.0 | 实数类型过程值输入 |
| 2 | PV_PER | 输入 | INT | 0 | 整数类型过程值输入 |
| 3 | DISV | 输入 | REAL | 0.0 | 干扰补偿 |
| 4 | INT_HPOS | 输入 | BOOL | FALSE | 正向积分保持开启 |
| 5 | INT_HNEG | 输入 | BOOL | FALSE | 反向积分保持开启 |
| 6 | SELECT | 输入 | INT | 0 | PID功能和脉冲功能的选择 |
| 7 | PV | 输入 | REAL | 0.0 | 过程值 |
| 8 | LMN | 输出 | REAL | 0.0 | 实数类型的PID输出控制量 |
| 9 | LMN_PER | 输出 | INT | 0 | 整数类型的PID输出控制量 |
| 10 | QPULSE | 输出 | BOOL | FALSE | 输出脉冲信号 |
| 11 | QLMN_HLM | 输出 | BOOL | FALSE | 控制量到达上限 |
| 12 | QLMN_LLM | 输出 | BOOL | FALSE | 控制量到达下限 |
| 13 | QC_ACT | 输出 | BOOL | TRUE | 下一周期PID是否执行 |
| 14 | CYCLE | 输入_输出 | REAL | 0.1 | PID计算的周期时间 |
| 15 | CYCLE_P | 输入_输出 | REAL | 0.02 | 脉冲输出的刷新时间 |
| 16 | SP_INT | 输入_输出 | REAL | 0 | 设定值 |
| 17 | MAN | 输入_输出 | REAL | 0 | 手动值 |
| 18 | COM_RST | 输入_输出 | BOOL | FALSE | 复位 |
| 19 | MAN_ON | 输入_输出 | BOOL | TRUE | 手/自动,默认为手动 |
| 20 | DEADB_W | 静态变量 | REAL | 0.0 | 偏差死区 |
| 21 | I_ITLVAL | 静态变量 | REAL | 0.0 | 初始积分值 |
| 22 | LMN_HLM | 静态变量 | REAL | 100.0 | 控制量上限 |
| 23 | LMN_LLM | 静态变量 | REAL | 0.0 | 控制量下限 |
| 24 | PV_FAC | 静态变量 | REAL | 1.0 | 过程值转换因子 |
| 25 | PV_OFFS | 静态变量 | REAL | 0.0 | 过程值转换偏移量 |
| 26 | LMN_FAC | 静态变量 | REAL | 1.0 | 输出控制量转换因子 |
| 27 | LMN_OFFS | 静态变量 | REAL | 0.0 | 输出控制量转换偏移量 |
| 28 | PER_TM | 静态变量 | REAL | 1.0 | 脉冲输出的周期时间 |
| 29 | P_B_TM | 静态变量 | REAL | 0.0 | 最小脉冲高电平/低电平时间 |
| 30 | TUN_DLMN | 静态变量 | REAL | 20.0 | 整定中的控制输出变化量 |
| 31 | PER_MODE | 静态变量 | INT | 0 | 整数类型输入转换模式 |
| 32 | PVPER_ON | 静态变量 | BOOL | FALSE | 输入过程值通道选择 |
| 33 | I_ITL_ON | 静态变量 | BOOL | FALSE | 积分功能初始化 |
| 34 | PULSE_ON | 静态变量 | BOOL | FALSE | 脉冲输出使能 |
| 35 | ER | 静态变量 | REAL | 0.0 | 偏差信号 |
| 36 | LMN_P | 静态变量 | REAL | 0.0 | 比例项结果 |
| 37 | LMN_I | 静态变量 | REAL | 0.0 | 积分项结果 |
| 38 | LMN_D | 静态变量 | REAL | 0.0 | 微分项结果 |
| 39 | PHASE | 静态变量 | INT | 0 | 自整定步骤 |
| 40 | STATUS_H | 静态变量 | INT | 0 | 自整定状态值 |
| 41 | STATUS_D | 静态变量 | INT | 0 | 过程类型 |
| 42 | QTUN_RUN | 静态变量 | BOOL | FALSE | 阶段2已激活(整定中) |
| 43 | PI_CON.GAIN | 静态变量 | REAL | 0.0 | PI_CON中的比例参数 |
| 44 | PI_CON.TI | 静态变量 | REAL | 0.0 | PI_CON中的积分参数 |
| 45 | PID_CON.GAIN | 静态变量 | REAL | 0.0 | PID_CON中的比例参数 |
| 46 | PID_CON.TI | 静态变量 | REAL | 0.0 | PID_CON中的积分参数 |
| 47 | PID_CON.TD | 静态变量 | REAL | 0.0 | PID_CON中的微分参数 |
| 48 | PAR_SAVE.PFAC_SP | 静态变量 | REAL | 1.0 | PAR_SAVE中的比例弱化因子 |
| 49 | PAR_SAVE.GAIN | 静态变量 | REAL | 0.0 | PAR_SAVE中的比例参数 |
| 50 | PAR_SAVE.TI | 静态变量 | REAL | 0.0 | PAR_SAVE中的积分参数 |
| 51 | PAR_SAVE.TD | 静态变量 | REAL | 0.0 | PAR_SAVE中的微分参数 |
| 52 | PAR_SAVE.D_F | 静态变量 | REAL | 5.0 | PAR_SAVE中的微分因子 |
| 53 | PAR_SAVE.CON_ZONE | 静态变量 | REAL | 100.0 | PAR_SAVE中的控制带 |
| 54 | PAR_SAVE.CONZ_ON | 静态变量 | BOOL | FALSE | PAR_SAVE中的控制带使能 |
| 55 | PFAC_SP | 静态变量 | REAL | 1.0 | 设定值改变时的比例弱化因子 |
| 56 | GAIN | 静态变量 | REAL | 2.0 | 比例增益 |
| 57 | TI | 静态变量 | REAL | 10.0 | 积分时间 |
| 58 | TD | 静态变量 | REAL | 10.0 | 微分时间 |
| 59 | D_F | 静态变量 | REAL | 5.0 | 微分因子 |
| 60 | CON_ZONE | 静态变量 | REAL | 100.0 | 控制带 |
| 61 | CONZ_ON | 静态变量 | BOOL | FALSE | 控制带使能 |
| 62 | TUN_ON | 静态变量 | BOOL | FALSE | 自整定使能 |
| 63 | UNDO_PAR | 静态变量 | BOOL | FALSE | 参数恢复使能 |
| 64 | SAVE_PAR | 静态变量 | BOOL | FALSE | 参数保存使能 |
| 65 | LOAD_PID | 静态变量 | BOOL | FALSE | 装载PID/PI_CON参数 |
| 66 | PID_ON | 静态变量 | BOOL | TRUE | PID或PI选择 |
关键词
温度控制,FB58,PID,参数整定,控制带
您可以前往全球资源库查看此文档


















 西门子官方商城
西门子官方商城












 关联文档
关联文档
 看过该文档的用户还看过哪些文档
看过该文档的用户还看过哪些文档

















扫码分享