

















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
6RA70 主从控制的应用
文档编号:A0084|
文档类型:操作指南|
发布时间:2024年03月12日
- 0
- 1604
- 12614
介绍了6RA70主从控制的应用。
一. peer-to-peer 通讯
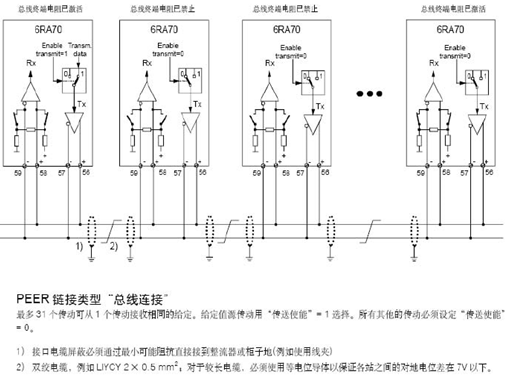
首先,介绍以下peer-to-peer 通讯:根据不同的应用形式分为三类:以X172 接口为例:
1. 串行连接

2.并行连接
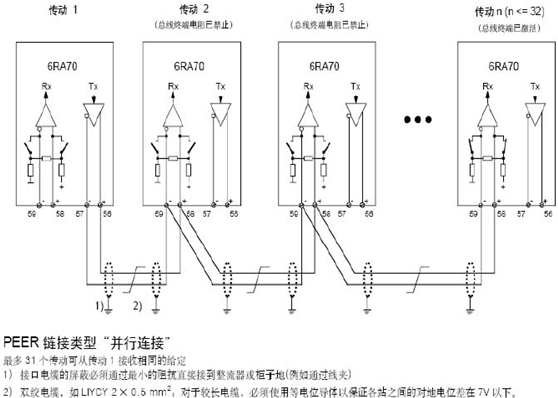
3.总线连接
4.参数设置:

二. 实际生产应用中,主从控制方式应用分两种形式:
1. 电机首尾通过法兰直接硬相连,主动装置工作在速度环工作状态,而从动装置工作在电流环(转矩环)状态,在这种方式中,一般情况下,定义远离减速机的电机作为主动电机,编码器接在主动装置所带的电机上。
从动装置通过peer-to-peer 网络接收来自主动装置发送来的电流(转矩)给定,速度实际值和控制字1。
连接简图1:

上图是电机硬轴直接连接的主从控制的控制方式连接简图,主电路连接请参考6RA70 手册。这种方式中,主动装置工作在速度环状态,产生转矩设定值,把这个值通过peer-to -peer 网络传递给从动装置,同时,把控制字1 也传到从动装置,使得主,从动装置起停操作同时进行。这时候,从动装置上的端子 34 ,37, 38 要短接在一起。实际速度传到从动装置,主要是为了标定励磁曲线。此时,从动装置的斜坡函数发生器和速度调节器不处于激活状态。通过这种连接,从动装置与主动装置能一起向前和向后运行。
根据生产工艺要求, 在一些场合, 工作负载量很小,只需一个电机工作就可以,此时,需把从动装置上的端子34 ,37和38 要用一个开关使其使能取消,同时P082不能设置成3 , 或把从动装置主电源断掉。
参数设置:
| 主动装置 | 从动装置1…n |
| P081=1 装置弱磁运行 | P081=1 装置弱磁运行 |
| P083=2 编码器反馈 | P083=4 自由连接的速度反馈 |
| P169=0 转矩控制 | P169=0 转矩控制 |
| P170=1 转矩控制 | P170=1 转矩控制 |
| P503=xx 电机-装置匹配系数 | |
| P500=6002 来自主动装置的转矩设定点 | |
| P609=6001来自主动装置的速度实际值 | |
| P648=6003 来自主动装置的控制字 | |
| P687=1 设置从动开关 | |
| P790=5 装置对装置通讯 | P790=5 装置对装置通讯 |
| P791=3 发送字数量 | P791=3 发送字数量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=167 实际速度 | |
| P794.02=148 转矩设定点 | |
| P794.03=30 控制字1 | |
| P795=1 终端电阻 | |
| P797=2s 报文监控时间 | P797=2s 报文监控时间 |
以上参数只是关于主从控制方面的设置,关于启动参见6RA70 手册的第7.5节的启动步骤.。
关于优化运行步骤:
(1) 主动装置的优化运行
a.打开电机和减速机之间的连接,b.在从动装置上设定P171=0 P172 =0c.执行P051=25 优化d.执行P051=26优化,必要时,进行手动优化,达到使输出转速平稳,为弱磁优化做准备e.执行P051=27优化f. 在从动装置上恢复P171 ,P172的值
(2).从动装置的优化运行
a.把主动装置的P171, P172设置成0b.执行P051=25 优化c.执行P051=27 优化d.把主动装置的P171 P172 恢复成原来的值
(3)当把电机与减速机连接以后,要设置P051=26 优化运行,调整转速达到平稳。
2. 第二种情况是应用于类似印刷行业,与第一种情况基本相同,在这种情况下,电机轴的连接可以自由分开。根据电机连接轴的连接方式分为下列两种情况:
见下列简图2:

图2
控制模式1
1. 电机轴连接在一起即,Ku1闭合
图中G1为主动装置,运行在速度环状态,,G2为从动装置,运行于电流环控制,给定值通过peer-to-peer 接收主动装置的转矩给定或电流给定。在这种情况下,电机轴连接Ku1必须牢固闭合,否则,可能由于失去速度环的控制而产生超速现象。
2. 当电机轴分开运行时,即Ku1脱开
此时,主动装置G1与从动装置G2独立工作于速度环控制模式, G1 的速度给定通过模拟量(或网络),G2的速度给定通过peer-to-peer,把G1的斜坡发生器的输出给到G2的速度环的给定,同时,把G2的模拟量作为G2的速度补偿量,从而达到G1和G2的同步。
参数设置:
| 主动装置 | 从动装置1…n |
| P081=1 装置弱磁运行 | P081=1 装置弱磁运行 |
| P083=2 编码器反馈 | P083=2 编码器反馈 |
| P169=0 转矩控制 | P169=0 转矩控制 |
| P170=1 转矩控制 | P170=1 转矩控制 |
| P503=xx 电机-装置匹配系数 | |
| P500=6002 来自主动装置的转矩设定点 | |
| P634.01=6001来自主动装置的速度给定值 |
| P634.02=11 速度补偿 | |
| P687=10 主从动切换开关 | |
| P648=6003 来自主动装置的控制字1 | |
| P790=5 装置对装置通讯 | P790=5 装置对装置通讯 |
| P791=3 发送字数量 | P791=3 发送字数量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=170 速度设定值 | |
| P794.02=148 转矩设定点 | |
| P794.03=30 控制字1 | |
| P795=1 终端电阻 | |
| P797=2s 报文监控时间 | P797=2s 报文监控时间 |
电机的优化运行操作:
把电机连接轴分开,分别对两个电机进行优化操作,详细操作,参考6RA70 操作手册第7.5章节。
控制模式2
当两电机轴Ku1 牢固连接时,主动装置G1和从动装置G2都工作于速度环控制,G2的速度给定同样来自G1的斜坡函数发生器的输出,但同时,要通过G2的速度补偿给定使G2的速度超前于G1装置5%,使得G2的速度环逐渐趋于饱和。把G1的速度调节器的输出通过peer-to-peer 传送到G2 作为转矩限幅,使得G2和G1的输出转矩相等。如果突然电机连接轴脱开,G2的速度只能增加5% 。此时由于G2的速度环退出饱和状态而按照大于G1的给定的5%运行,不致于超速飞车。
参数设置情况:
| 主动装置 | 从动装置1…n |
| P081=1 装置弱磁运行 | P081=1 装置弱磁运行 |
| P083=2 编码器反馈 | P083=2 编码器反馈 |
| P169=0 转矩控制 | P169=0 转矩控制 |
| P170=1 转矩控制 | P170=1 转矩控制 |
| P171=xx 电机-装置匹配系数 | |
| P430.01=10 来自主动装置的转矩设定点开关 | |
| P430.02=11 速度补偿 | |
| P431.01=6002 来自主动装置的转矩设定点 | |
| P431.02=2 转矩限幅 | |
| P605.01=204 转矩限幅 | |
| P606.01=4 打开转矩限幅 | |
| P621=15 速度超前设定 | |
| P634.01=6001来自主动装置的速度设定点 | |
| P634.02=11速度补偿 | |
| P648=6003 来自主动装置的控制字1 | |
| P706=11 速度补偿开关 | |
| P712=5% | |
| P716=10 速度超前补偿开关 | |
| P790=5 装置对装置通讯 | P790=5 装置对装置通讯 |
| P791=3 发送字数量 | P791=3 发送字数量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=170 速度设定值 | |
| P794.02=148 转矩设定点 | |
| P794.03=30 控制字1 | |
| P795=1 终端电阻 | |
| P797=2s 报文监控时间 | P797=2s 报文监控时间 |
电机的优化运行操作:把电机连接轴分开,分别对两个电机进行优化操作,详细操作,参考6RA70 操作手册第7.5章节
关键词
peer-to-peer 通讯 主从控制 转矩限幅


- 评论
更多
-
分享

手机扫码分享文档(需在手机端重新登录账号)
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错








 关联文档
关联文档
- 6SE70 主从控制的应用
- 两台变频器做主从控制时的参数设置
- 6RA70系列12脉动串联连接的应用
- 在转炉的应用中,如何实现电机转矩、电机电流、输出频率全部到达后开电机抱闸的控制?
- 6RA70零速给定时电机缓慢转动的应对方法
- 高性能、本地化、面向工业控制的未来 通过组合标准模块、F-Safe 和 Ex-I/O 模块,提高灵活性、拓展应用场景
- 提升应用中的抱闸控制(适用于 SIMOREG DC-Master, 6RA70 和 SINAMICS DCM, 6RA80)
- 标准变频器驱动多台电机的应用
- 西门子新一代变频器SINAMICS G150 在锅炉风机中的应用
- SM331 RTD(7PF01)和TC (7PF11)模板在PCS 7 V6.1 SP1中的应用








{{item.nickName}}