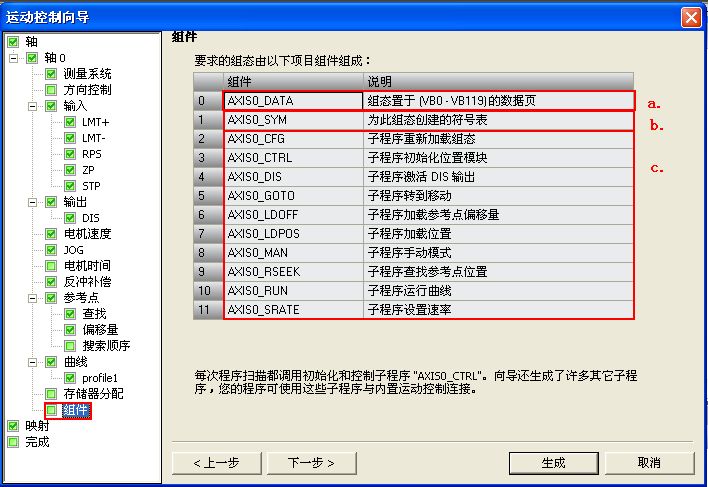
当您完成对运动控制向导的组态时,只需点击生成(Generate),然后运动控制向导会执行以下任务: a. 将组态和曲线表插入到您的 S7-200 SMART CPU 的数据块(AXISx_DATA)中; b. 为运动控制参数生成一个全局符号表(AXISx_SYM); c. 在项目的程序块中增加运动控制指令子程序,您可在应用中使用这些指令; 要修改任何组态或曲线信息,您可以再次运行运动控制向导。 注意:由于运动控制向导修改了程序块、数据块和系统块,要确保这三种块都下载到 S7-200 SMART CPU 中。否则,CPU 可能会无法得到操作所需的所有程序组件。










 西门子官方商城
西门子官方商城







































扫码分享