

















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

如何配置 S7 Distributed Safety 安全系统

发布时间:2024年07月15日
- 0
- 92
本章节简要介绍如何配置一个S7 Distributed Safety 故障安全系统
一个完整的故障安全系统由三个部分组成,分别是:安全输入、安全评估单元和安全输出。在工厂自动化应用的场合,一般采用的是分布式故障安全的系统,其产品主要是S7-300/400F系列以及ET200系列。
硬件产品选择上,无论是输入、CPU还是输出,一定要选择产品名称带“F”的模板,比如315F,416F,326F等。否则普通模板是不能处理故障安全信号的。安全系统有安全完整性等级的要求(比如:SIL2或SIL3),因而F类型的模板比普通的模板带有更多的诊断功能,其接线方式有时也有特殊的要求(比如要求冗余方式接线),但F类型的模板与普通的模板是可以在一起混用的。考虑到不同安全等级的要求,往往还会要求S7-300系列的“F”型的模板统一安装在隔离模板(Safety protector module)的右边,与普通模板进行电气隔离;而ET200S的模板往往是通过不同的电源模板将其进行隔离的,但需要注意ET200S的“F-IO”模板的前面必须使用普通的电源模板(PS),而“F”型的电源模板(F-PS)后面只能使用普通的电子模板(图1)。
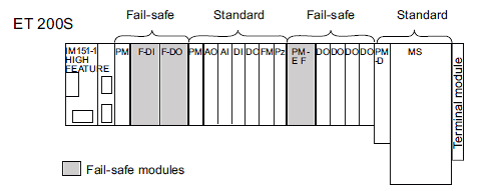
图1 ET200S 故障安全型系统的配置
除了PLC,安全系统的输入往往也都是具有安全等级要求的,比如:急停按钮、光栅/光幕、安全门锁等等;而输出部分也往往是安全型的,比如安全灯柱、安全型的变频器等等,但不要求一定使用安全型的继电器或接触器。
软件方面,除了STEP7,分布式故障安全还需要Distributed Safety的软件包。
下图是一个典型的的PLC控制系统,ET200现场子站装有输入模块负责采集现场信号,通过PROFINET总线传递到CPU中,CPU执行逻辑程序通过ET200站点上的输出模块控制电机运行。
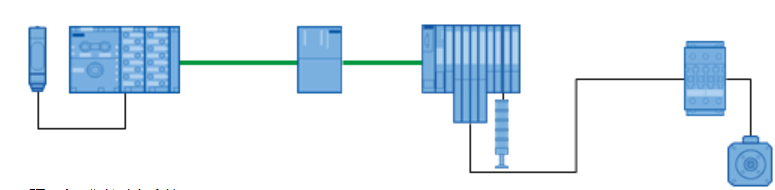
图2 标准控制系统
经过简单的三个步骤,就可以将标准控制系统配置成故障安全系统。
第一步:在ET200子站上增加安全的输入模块用于急停按钮、安全门锁和光幕等安全信号采集,增加安全输出模块和符合安全等级要求的接触器等产品控制电机运行。
第二步:将ET200站点的接口模块更换为支持安全模块的型号,将CPU更换为安全CPU。
第三步:安装安全软件包,在安全CPU中编写实现安全功能的安全程序并装载到CPU中。
完成后,一个标准控制系统就配置成具有安全功能的故障安全系统,同时还具有原标准控制系统的功能。
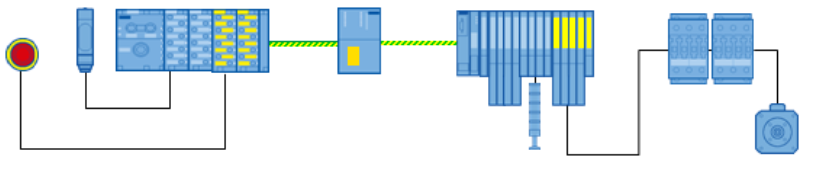
图3 故障安全系统

剩余80%未阅读,请登录查看大全章节内容
- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错

















{{item.nickName}}