LOGO! PI 比例积分控制器
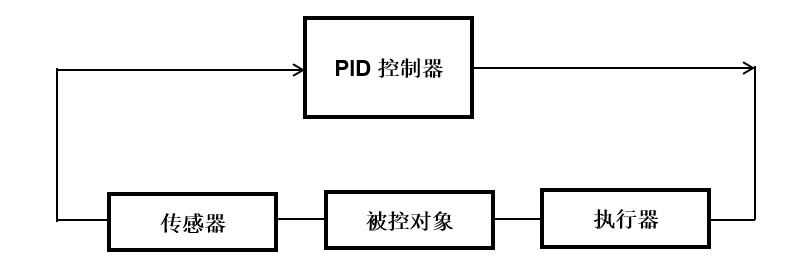
PID 控制是目前工业过程中应用最为广泛的闭环控制方式。控制器通过传感器对被控对象采样从而获得过程值的反馈,与设定值的差值经过计算得到输出结果调整执行器,以达到减小过程值与设定值之间偏差的目的。如下图所示:
LOGO!支持P比例作用控制器和I积分作用控制器。 这两种控制器可以单独使用,也可以组合使用。(暂时不支持D微分控制)
打开LOGO! comfort软件,在模拟量组内拖出PI控制器指令到编程区域中。(如图.1)
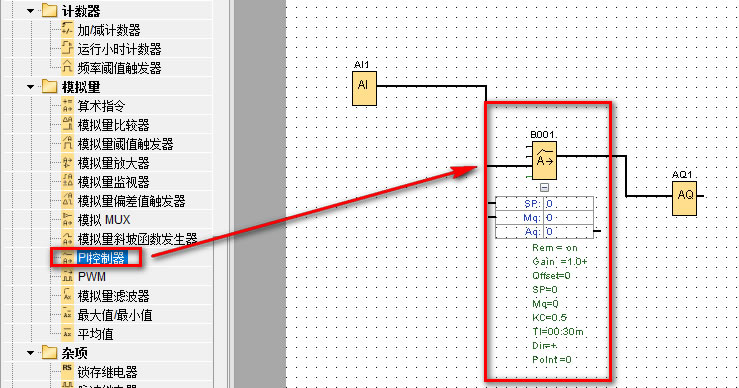
图.1 PI控制功能块调用
PI功能块介绍
连接
| 描述
|
输入 A/M
| 设置控制器的模式:
1: 自动模式
0: 手动模式
|
输入 R
| 使用输入 R 复位输出 AQ。 只要置位了该输入,输入 A/M 就会被禁用。输出 AQ 置位为 0。
|
输入 PV
| 模拟量值: 过程变量,影响输出
|
参数
| SP: 设定值分配
值范围:-10000 至 20000
KC: 增益
值范围:00.00 至 99.99
TI: 积分时间
值范围:00:01m 至 99:59 m
Dir: 控制器的作用方向
值范围:+ 或 -
Mq: 手动模式下 AQ 的值
值范围:0 至 1000
Min: PV 的最小值
值范围:-10000 至 20000
Max: PV 的最大值
值范围:-10000 至 20000
A: 增益
值范围:-10.00 至 10.00
B: 增益
值范围:-10000 至 10000
p: 小数位数
值范围:0, 1, 2, 3
|
输出 AQ
| 输出只能连接到模拟量标志、模拟量输出或网络模拟量输出。
AQ 的值范围:0 至 1000
|
表.1 功能块各管脚说明
参数 SP 和 Mq
设定值 SP 以及 Mq 数值可以由另外一种已经编程的功能来提供。 可以使用以下功能的实际值:
● 模拟量比较器 (实际值 Ax - Ay)
● 模拟量阈值触发器(实际值 Ax)
● 模拟量放大器 (实际值 Ax)
● 模拟量多路复用器 (实际值 AQ)
● 模拟量斜坡函数发生器 (实际值 AQ)
● 算术指令 (实际值 AQ)
● 增/减计数器 (实际值 Cnt)
● 模拟量滤波器 (实际值 AQ)
● 平均值 (实际值 AQ)
● 最大值/最小值 ((实际值 AQ)
● 接通延迟 (当前时间 Ta)
● 断开延迟 (当前时间 Ta)
● 接通/断开延迟 (当前时间 Ta)
● 有保持的接通延迟 (当前时间 Ta)
● 脉宽触发继电器(单脉冲输出)(当前时间 Ta)
● 边缘触发的脉冲继电器 (当前时间 Ta)
● 异步脉冲发生器 (当前时间 Ta)
● 楼梯照明开关 (当前时间 Ta)
● 多功能开关 (当前时间 Ta)
● 秒表 (实际值 AQ)
● PI 控制器(实际值 AQ)
● 阈值触发器 (实际值 Fre)
以下案例采用算术指令的实际值来实现
双击打开该功能块,(如图.2)
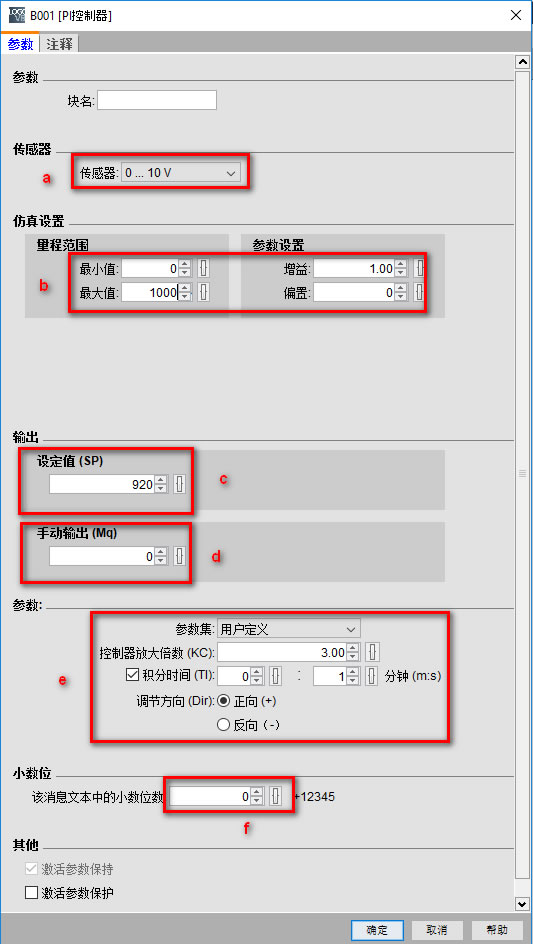
图.2 PI内部参数设置
a.选择传感器的类型(0~10V电压,0~20mA电流,4~20mA电流,PT100)
b.设定传感器的量程,注意:(这里只需要设定最大值或者最小值,修改完成后,增益和偏置值自动计算填写)
c.PI控制的设定值,可以直接在此菜单内设置或者通过引用功能实现 (以下案例采用算术指令的实际值来实现)
d.PI控制的手动输出值,可以直接在此菜单内设置或者通过引用功能实现
e.设定PI参数:可以选择预定义参数或者用户自定义参数。(图.3)
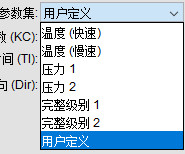
图.3 预定义参数选择
- 控制器放大倍数KC:增益参数P
- 积分时间TI : ()min分钟 ,()s秒
- PI控制器的调节方向:正向、反向
f.设定参数在文本显示器中的小数点位数(参考以下案例)
PI时序图
AQ 变化的性质、方式和速度取决于参数 KC 和 TI。 因此,图中的 AQ 曲线就是一个很好的说明。 控制作用是连续的;因此该图只描述了其中一部分。(图.4)
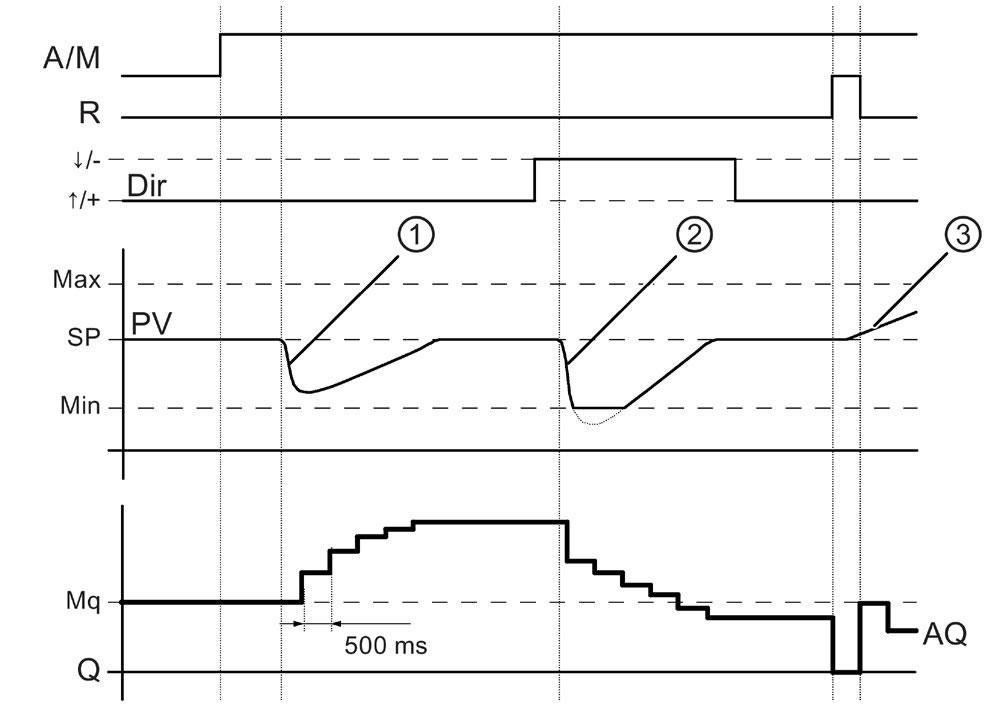
图.4 PI控制时序图
1. 干扰会导致 PV 下降,当 Dir 的方向为向上时,AQ 会增加,直至 PV 再次与 SP 一致。
2. 干扰会导致 PV 下降,当 Dir 的方向为向下时,AQ 会降低,直至 PV 再次与 SP 一致。(不能在功能运行时改变方向(Dir)。 此处显示的改变仅为了说明。)
3. 当通过输入 R 将 AQ 置位为 0 时,PV 将更改。 这是因为 PV 增加,由于 Dir = 向上而导致 AQ 下降。
PI功能说明:
A/M设定:如果输入 A/M 置位为 0,则该特殊功能会通过您用参数 Mq 设置的值发布输出 AQ。
如果输入 A/M 置位为 1,则启动自动模式。 当积分和数值 Mq 被采用时,控制器功能开始计算。
更新值 PV 进行计算的常用公式:
更新值 PV= (PV • 增益) + 偏移
如果更新值 PV = SP,则该特殊功能不会更改 AQ 的值。
Dir = 向上(+) (时序图编号 1 和 3。)
如果更新值 PV > SP,则该特殊功能会减小 AQ 的值。
如果更新值 PV < SP,则该特殊功能会增加 AQ 的值。
Dir = 向下(-) (时序图编号 2。)
如果更新值 PV > SP,则该特殊功能会增加 AQ 的值。
如果更新值 PV < SP,则该特殊功能会减小 AQ 的值。
受到干扰时,AQ 会继续增增/减少,直至更新值 PV 再次与 SP 一致。 AQ 变化的速度取决于参数 KC 和 TI。
如果输入 PV 大于参数 Max,则更新值 PV 设置为 Max 的值。如果 PV 小于参数 Min,则更新值 PV 设置为 Min 的值。
如果输入 R 置位为 1,则复位 AQ 输出。 只要置位了 R,输入 A/M 就会被禁用。
PI控制器应用举例
现有恒压供水项目,传感器0-10V的数值,LOGO转换成数字量PV范围为0-1000,实际传感器的量程范围为0~0.96Mpa,
需要在LOGO屏幕内设定SV值,
输出为0-1000的数字量,转换为模拟量为0-10V的模拟量输出控制电机的转速。
程序设置如下:(如图.5)
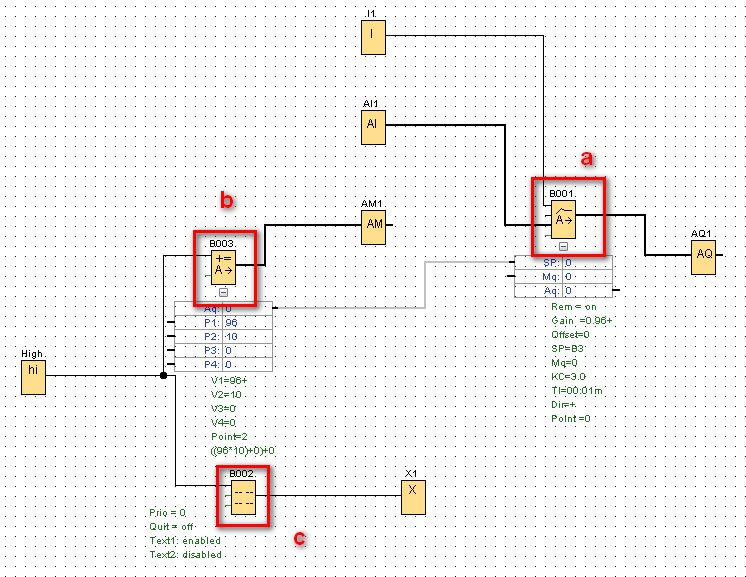
图.5 PI控制应用举例
a.双击打开PI控制器参数设置:(图.6)
- 模拟量输入选择为0....10V输入
- 传感器的量程范围为0~0.96Mpa,此处设置为最小值0,最大值960
- 输入设定值使用算数指令的引用功能(引用方法查看图.5内的Aq与SP连线)
- 参数集选择用户自定义P值为3,积分时间为1s,正向作用
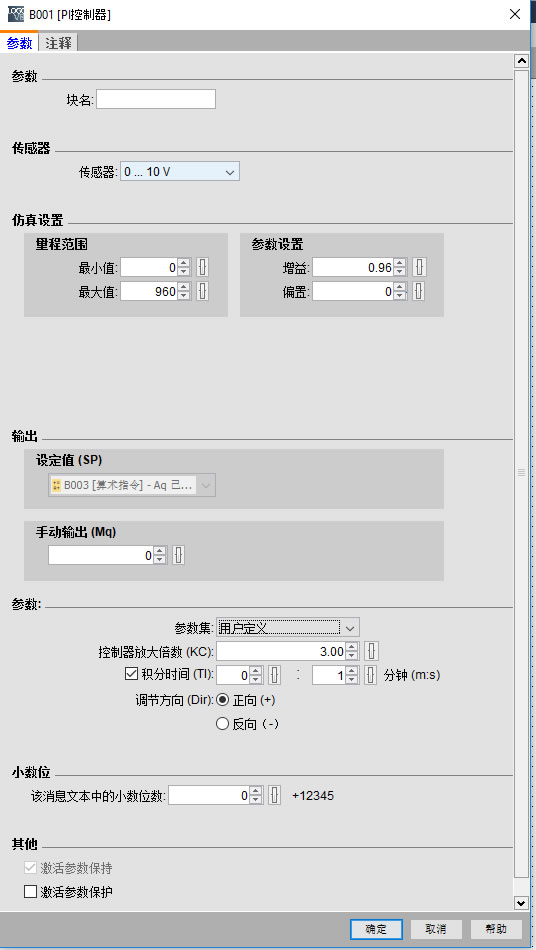
图.6 举例恒压供水PI参数设置
b.双击打开算术指令参数设置(图.7)
- 传感器的量程范围为0~0.96Mpa,故设定值范围同样0~0.96Mpa
- V1内设置为96,运算符1为乘法:×
- V2内设置为10
- 小数位:消息文本内的小数位数为2位小数
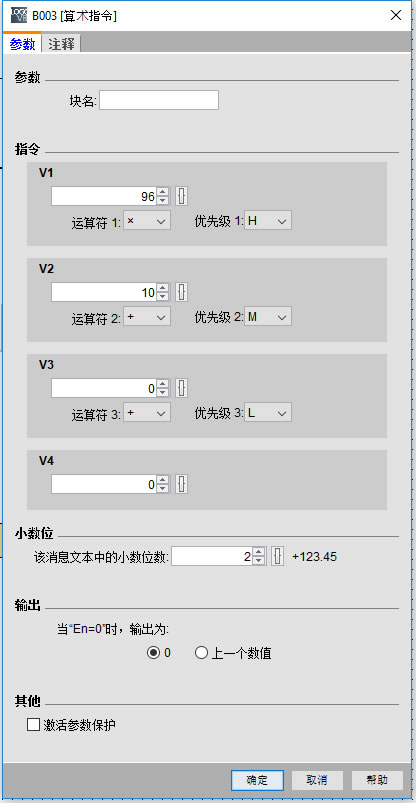
图.7 举例恒压供水算术指令参数设置
c.双击消息文本,将算术指令的V1拖入到文本显示器编辑器内(图.8)
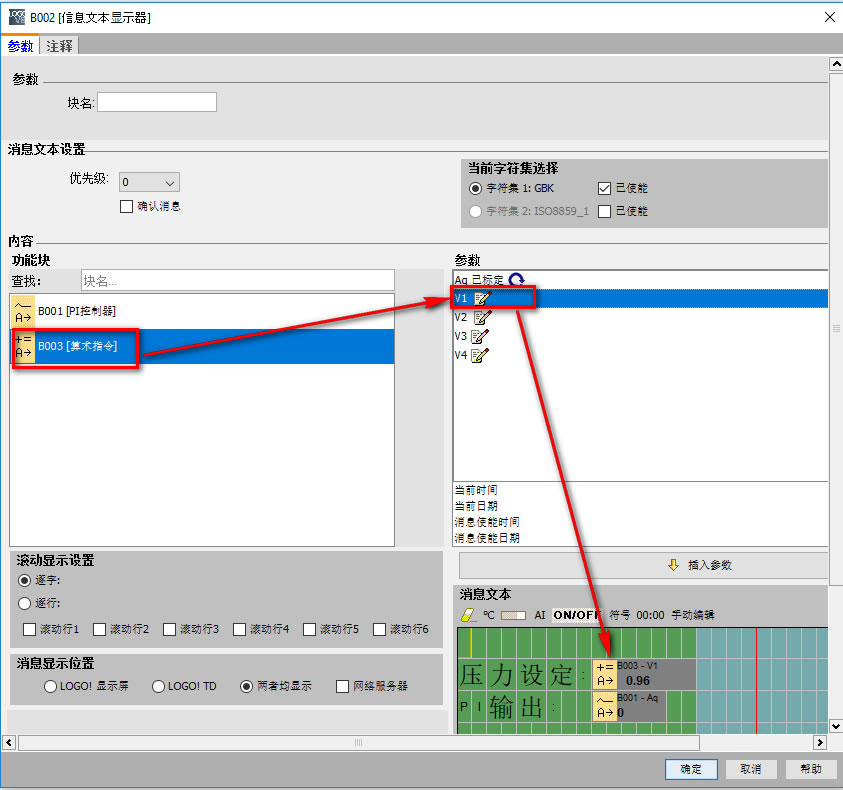
图.8 举例恒压供水文本显示器参数设置
运行程序后,设定SV值后,根据反设定值与馈值的差值进行PI运算后输出到模拟量AQ1控制电机转速
查看运行画面(图.9)
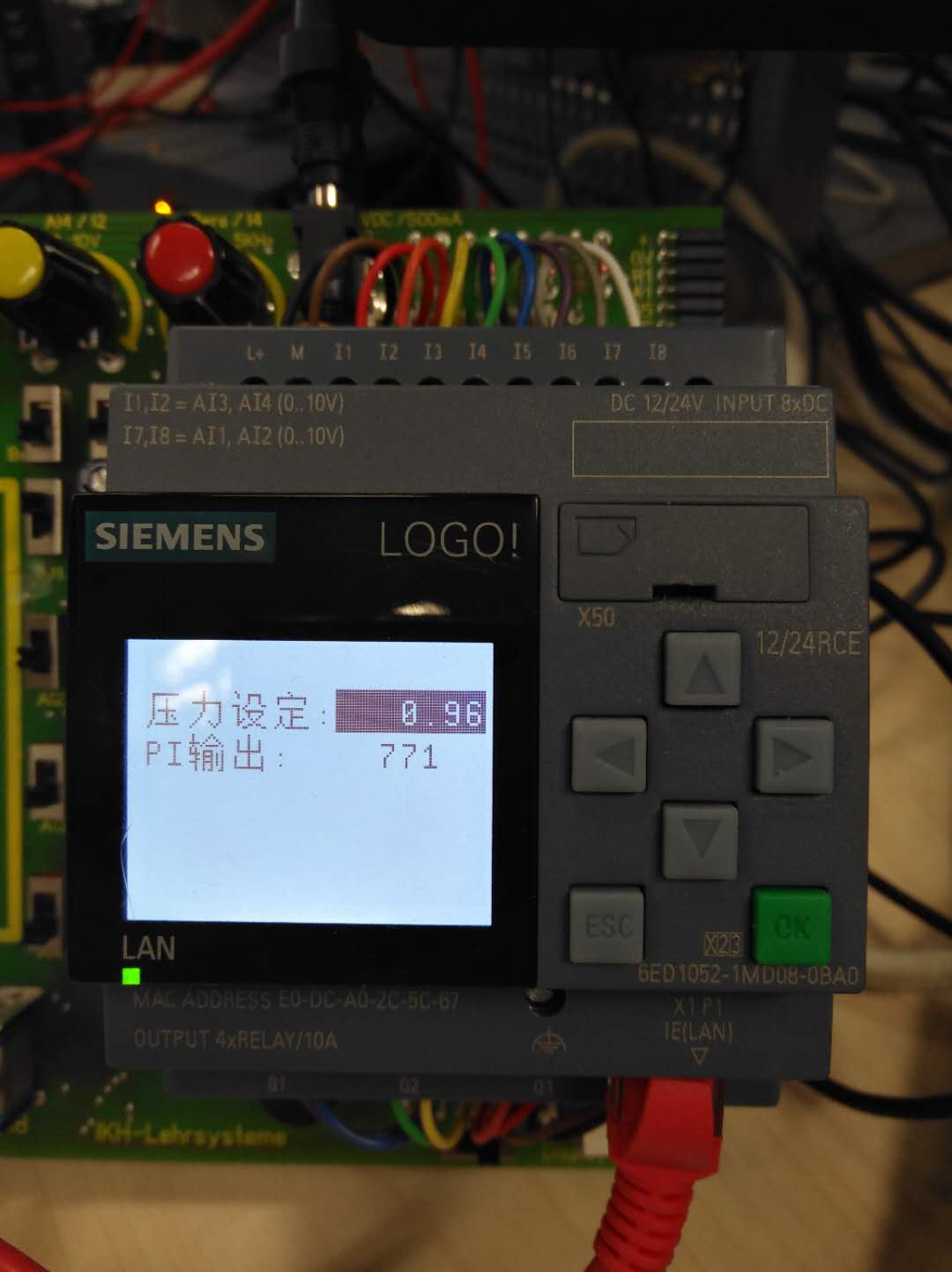
图.9 运行参数设置
画面中直接输入量程范围实际值,实现PI控制
 注意:此指令库/程序的作者和拥有者对于该软件的功能性和兼容性不负任何责任。使用该软件的风险完全由用户自行承担。由于它是免费的,所以不提供任何担保,错误纠正和热线支持,用户不必为 此联系西门子技术支持与服务部门。
注意:此指令库/程序的作者和拥有者对于该软件的功能性和兼容性不负任何责任。使用该软件的风险完全由用户自行承担。由于它是免费的,所以不提供任何担保,错误纠正和热线支持,用户不必为 此联系西门子技术支持与服务部门。
常见问题:
1.如何禁用P比例或者I积分功能
如参数 KC 为数值 0,则不能执行"P"(比例控制)功能。 如参数 TI 为数值 99:59 m,则不能执行"I"(积分作用控制)功能。
2.PI控制器的采样周期时间可以修改吗?
采样时间固定为 500 ms。不可以修改。










 西门子官方商城
西门子官方商城



























扫码分享