FB58高级功能
FB58 “TCONT_CP“与FB41“CONT_C”相比增加了如表1.所示的功能,本文将以表1.为引导,逐一描述
表1. FB58 “TCONT_CP“与FB41“CONT_C”功能对比
| FB41 | FB58 |
|---|
| 过程I/O处理 | √ | 增加PER_MODE |
|---|
| 设定值弱化 | - | √ |
|---|
| 积分保持 | √ | 增加正/反向保持 |
|---|
| 控制带 | - | √ |
|---|
| 自整定 | - | √ |
|---|
| 参数装载/保存/重载 | - | √ |
|---|
| PWM | - | √ |
|---|
| 无扰切换 | 手动→自动 | √ |
|---|
注:过程I/O已经在前面的文档里描述,故不再重复
设定值弱化PFAC_SP
PFAC_SP=1.0 设定值发生变化,比例作用发挥全部作用;
PFAC_SP=0.0 设定值发生变化,比例作用不发挥任何作用。
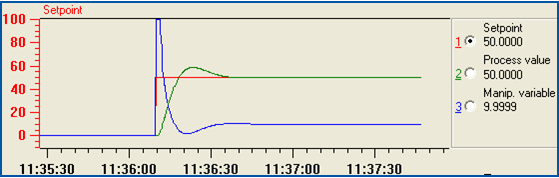
图1. FB58 “TCONT_CP“: PFAC_SP=1.0
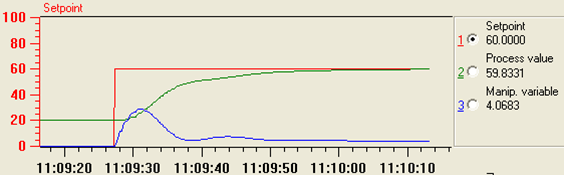
图2. FB58 “TCONT_CP“: PFAC_SP=0.0
积分保持
FB58 “TCONT_CP“积分保持增加了正/反向积分保持功能
正向积分保持:ER>0,积分作用冻结
反向积分保持:ER<0,积分作用冻结
表2.积分保持
| INT_HPOS | INT_HNEG |
|---|
| 正向保持 | 1 | 0 |
| 反向保持 | 0 | 1 |
| 积分保持 | 1 | 1 |
下图由WINCC截取各个积分保持的曲线:
黑色(SP):设定值
红色(PV):当前值
蓝色(OUT):PID输出
粉色(I):积分分量
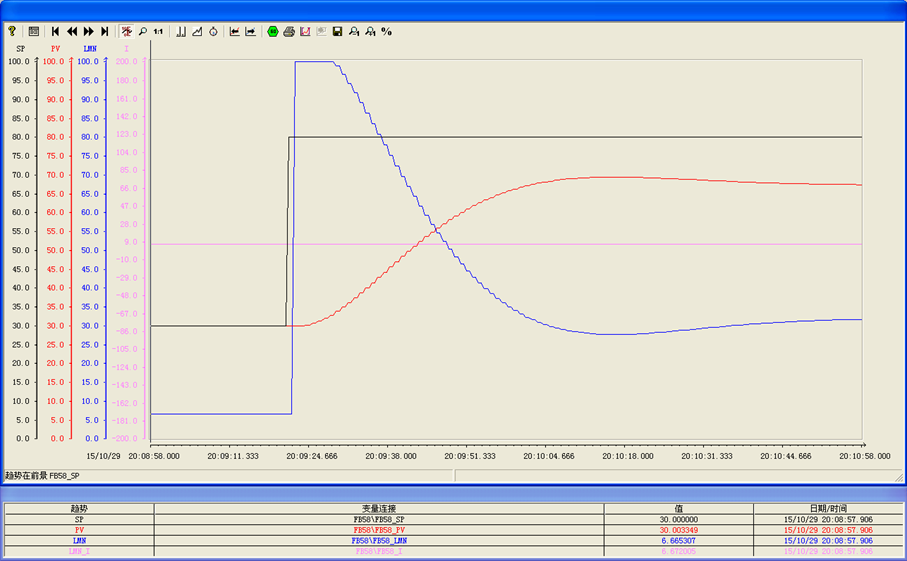
图3.正向积分保持
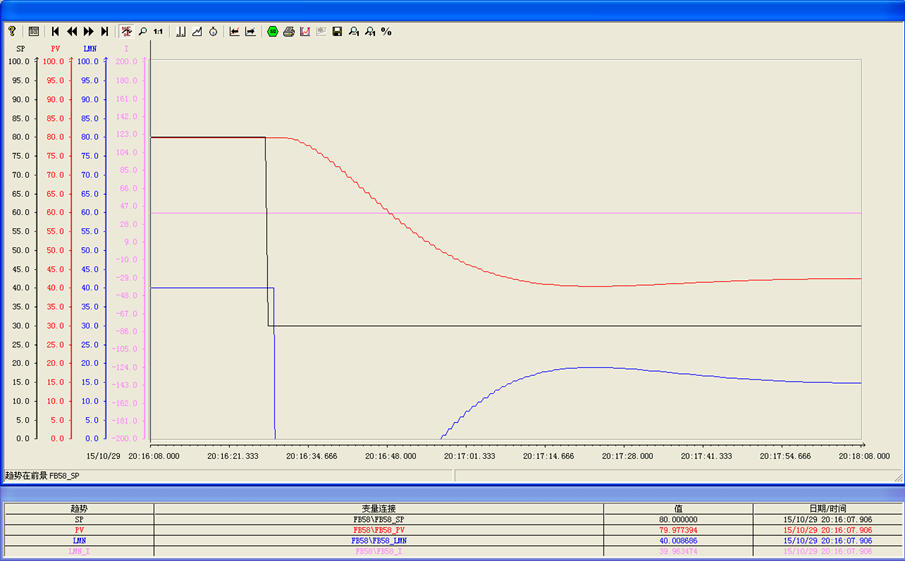
图4. 反向积分保持
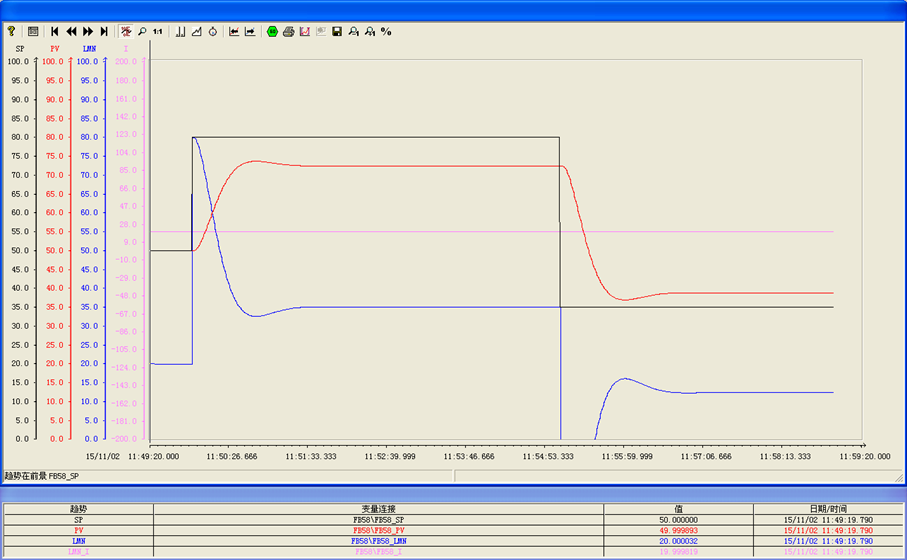
图5.积分保持
控制带CON_ZONE
温度控制回路是一个有明显滞后特性的对象,这给实际的调节过程带来了很多的问题,最显著的困难就是在过程值偏离设定值较大时,调节过程过于缓慢,而在接近设定值时容易出现较大的超调。
从上述的两个问题出发,PID应该满足这样的功能:
1,在偏差超过一定的范围时,PID输出最大或者最小的调节量,让温度值快速回到一个小的范围中,以缩短回路的调节时间;
2,在设定值附近时,越靠近调节量变化越小,以防止超调。
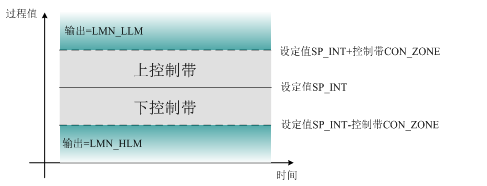
图6,控制带
由上图可见:
1,PV>SP_INT+CONE_ZONE; LMN=LMN_LLM
2,PV<SP_INT+CONE_ZONE; LMN=LMN_HLM
3,.SP_INT-CON_ZONE < PV < SP_INT+CON_ZONE; LMN=LMN_sum
下图由WINCC截取死区的控制曲线:
黑色(SP):设定值
红色(PV):当前值
蓝色(OUT):PID输出
粉色(I):积分分量
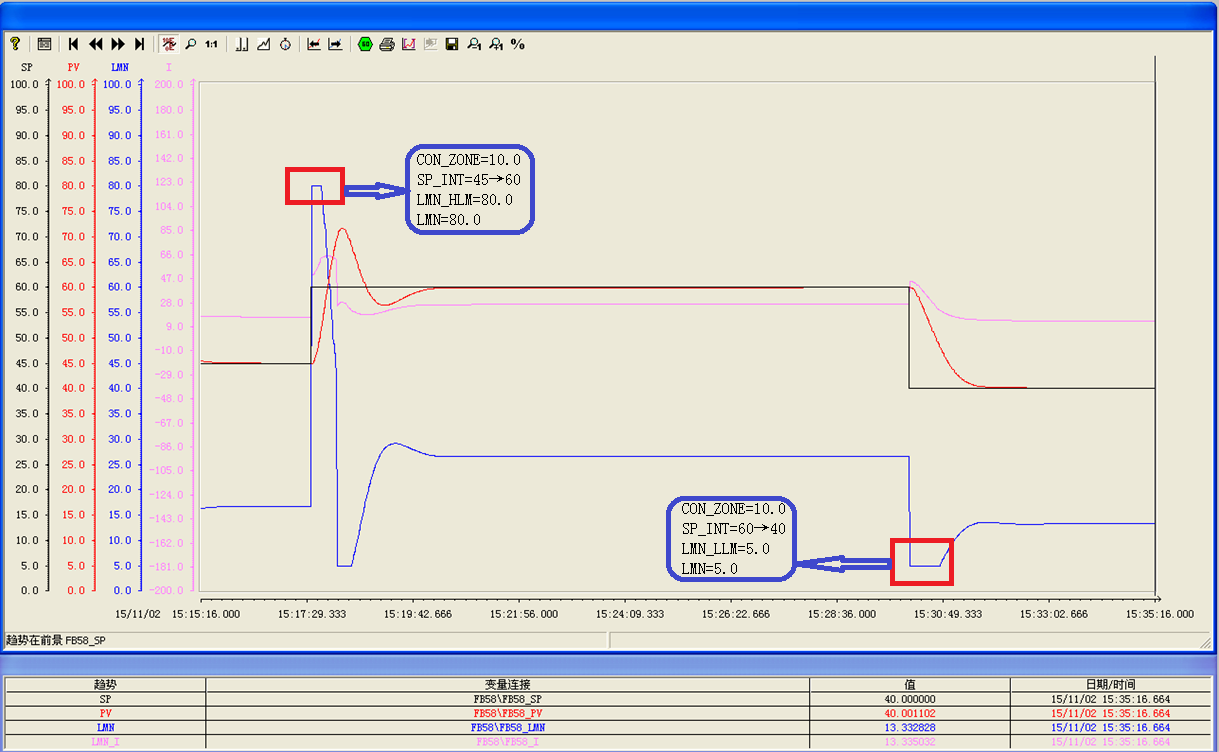
图7. 控制带控制方式
自整定
FB58 “TCONT_CP“功能块自带自整定功能。
自整定有如下几种整定方式:
1,使用设定值阶跃变化,通过逼近工作点来实现整定;
2,通过设置一个起始位,在工作点上进行整定;
注: 以上两种方式均可在控制面板或程序内实现。
自整定可整定如下参数:
1,PFAC_SP;
2,比例参数GAIN;
3,积分时间TI;
4,微分时间TD;(仅PID参数整定)
5,微分因子D_F;
6,控制带开/关CONZ_ON=1;(仅PID参数整定)
7,控制带宽度CON_ZONE;(仅PID参数整定)
通过控制面板自整定
如下图示所,通过面板做自整定:
注: 以STEP 7 V5.5为例

图8. 自整定控制面板

图9. 自整定介绍. 单击Next,下一步
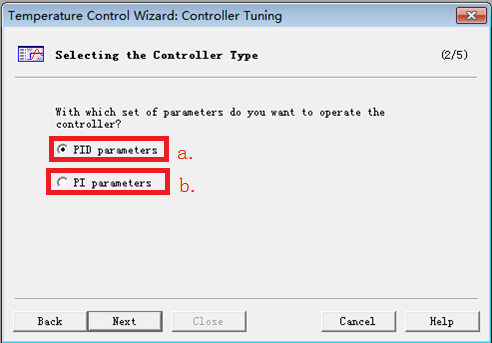
图10 .整定控制器参数选择 . 单击Next,下一步
a. PID参数整定,包含控制带及微分参数;
b.PI参数整定 ,不包含控制带及微分参数.
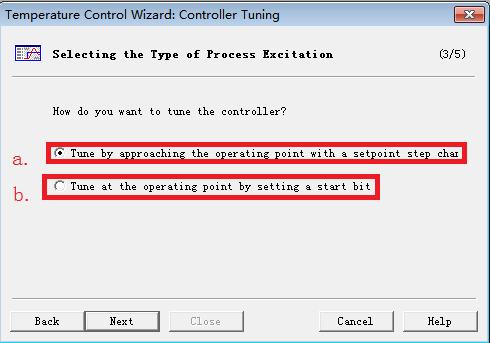
图11. 自整定激励方式 . 单击Next,下一步
a. 使用设定值阶跃变化,通过逼近工作点来实现整定;
b. 通过设置一个起始位,在工作点上进行整定.
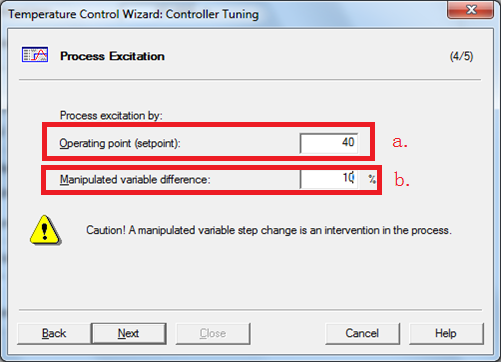
图12. 过程激励. 单击Next,下一步
a. 设定值
1,当在上一步选择"Tune at the operating point by setting a start bit", 无法修改;
2,当在上一步选择"Tune by approaching the operating point with a setpoint step change",可修改设定值阶跃值.
b,输出值阶跃(TUN_DLMN):
当进行整定后进入PHASE 2,LMN=LMN0+TUN_DLMN (为阶跃值).
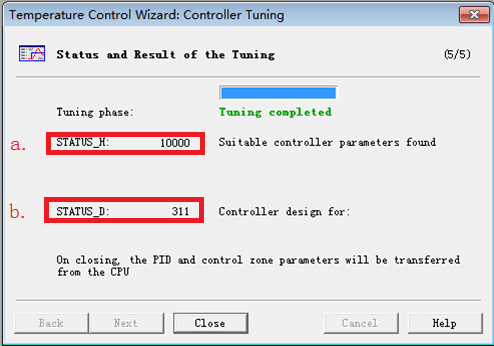
图13. 自整定结果
a,整定结果
b,控制器类型
通过程序块自整定
同样也可以通过程序块进行自整定,步骤如下:
1.设置TUN_ON=TURE,准备整定控制器。控制器从阶段0切换到阶段1。
2.在阶段1中等待一段时间后,在SP_INT参数设置一个设定值阶跃变化,或者设置TUN_ST=TURE。控制器输出一个由数值TUN_DLMN改变了的可调节变量,然后开始搜索拐点。
设定值阶跃自整定方式
由WINCC截图可看设定值阶跃自整定:
设定值(SP):红色
反 馈 (PV):绿色
输 出 (LMN):深蓝色
自整定整定阶段(PHASE):浅蓝色
自整定启动(TUN_ON):紫色
整定结果(STAUTS_H):黄色
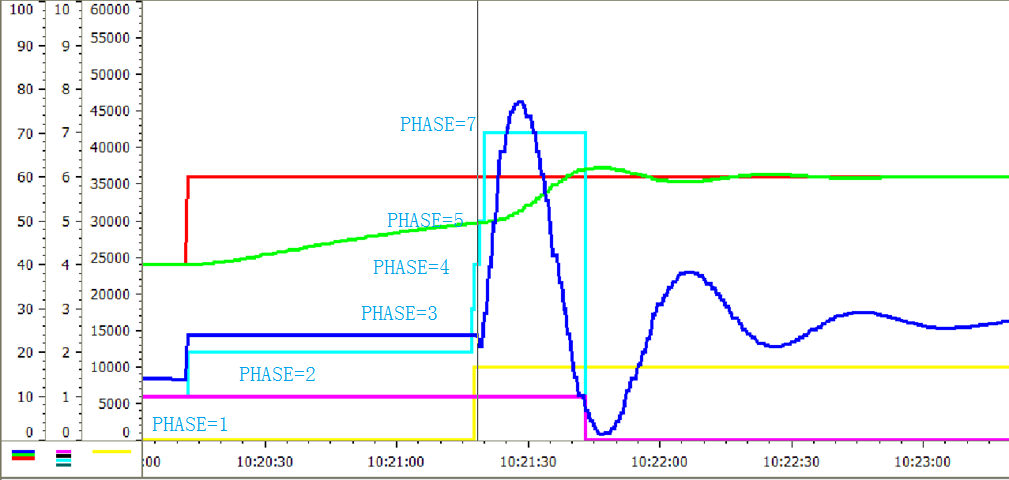
图14. 设定值阶跃自整定方式
工作点自整定方式
由WINCC截图可看设定值阶跃自整定:
设定值(SP):红色
反 馈 (PV):绿色
输 出 (LMN):深蓝色
自整定整定阶段(PHASE):浅蓝色
自整定启动(TUN_ON):紫色
整定结果(STAUTS_H):黄色
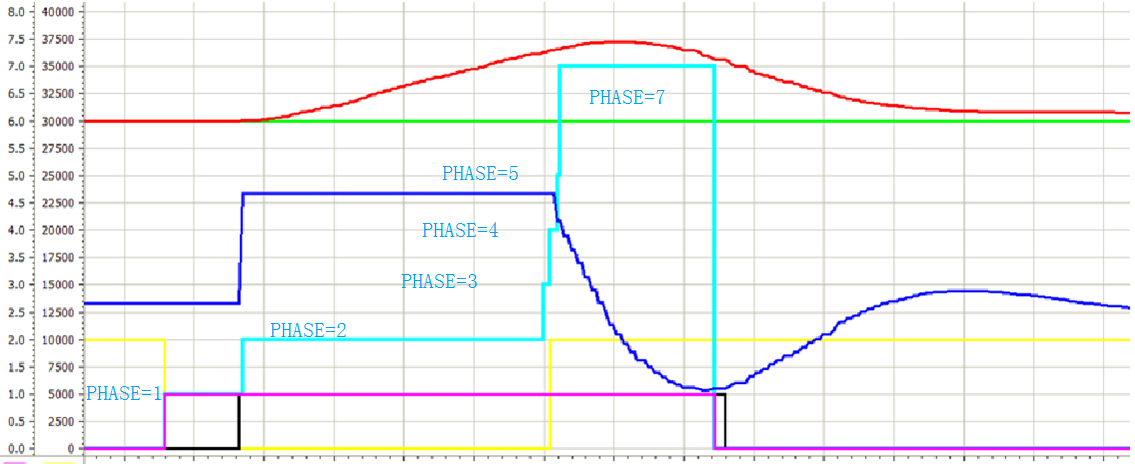
图15. 工作点自整定方式
自整定过程PHASE
由以上两图可知,当激活自整定后,主要有4个阶段:
PHASE 1:TUN_ON=TRUE,进入PHASE 1 LMN当前值写入.DBD220(LMN0);
PHASE 2:由SP_INT的阶跃变化或TUN_ST触发整定,进入PHASE 2,搜索拐点LMN=LMN0+TUN_DLMN;
PHASE 3~5:参数整定,当PV值超过了SP值阶跃变化的75%,整定结束。始终以自动方式启动,并且LMN=LMN0+0.75*TUN_DLMN(即使整定前处于手动模式)
PHASE 7:检查过程类型
注意事项:
1,设定值阶跃和TUN_DLMN必须合适匹配,如果TUN_DLMN太高,设定值阶跃变化的75%范围内找不到拐点;
2,TUN_DLMN必须足够高,以便过程变量可以至少达到设定值阶跃变化的22%,否则可能会一直停留在PHASE 2。
自整定出错状态和纠正方法
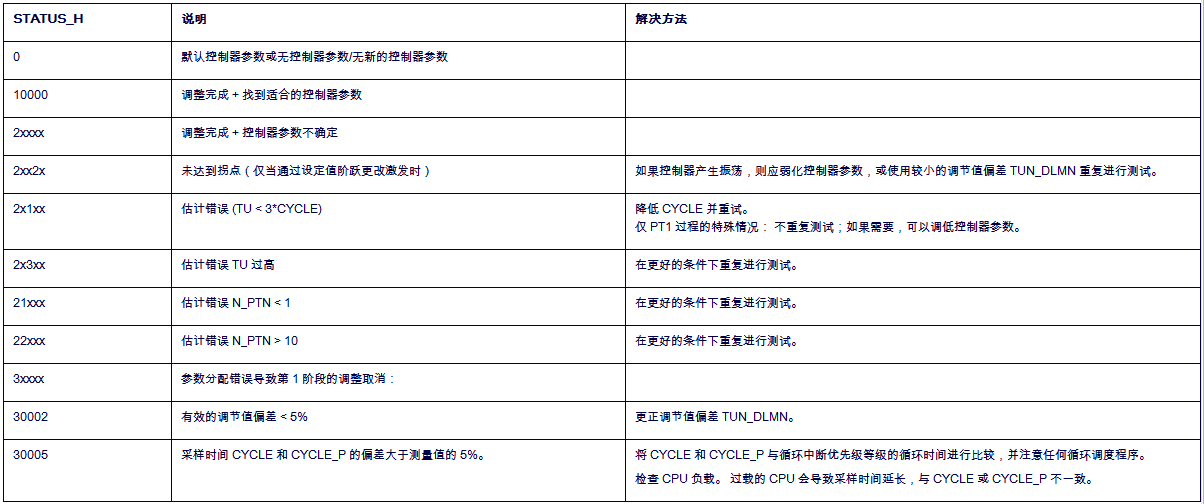
图16. 自整定常见问题
注意:
1,同时置位TUN_ON和TUN_ST,系统始终处于PHASE1,无法启动自整定;
2,当有效的TUN_DLMN<5%时(阶段1结束),STATUS_H=30002,整定被终止;
3,采样时间CYCLE和CYCLE_P之间的差值超过了5%, STATUS_H=30005,整定被终止。










 西门子官方商城
西门子官方商城



























扫码分享