

















 西门子官方商城
西门子官方商城
- 自动化系统
- 驱动技术
- 低压电气
- 工业服务
- 其他
更多

MC_Power

发布时间:2024年08月08日
- 1
- 1709
MC_Power 指令说明
MC_Power
指令名称:启动/禁用轴。
功能:使能轴或禁用轴。
使用要点:在程序里一直调用,并且在其他运动控制指令之前调用并使能。
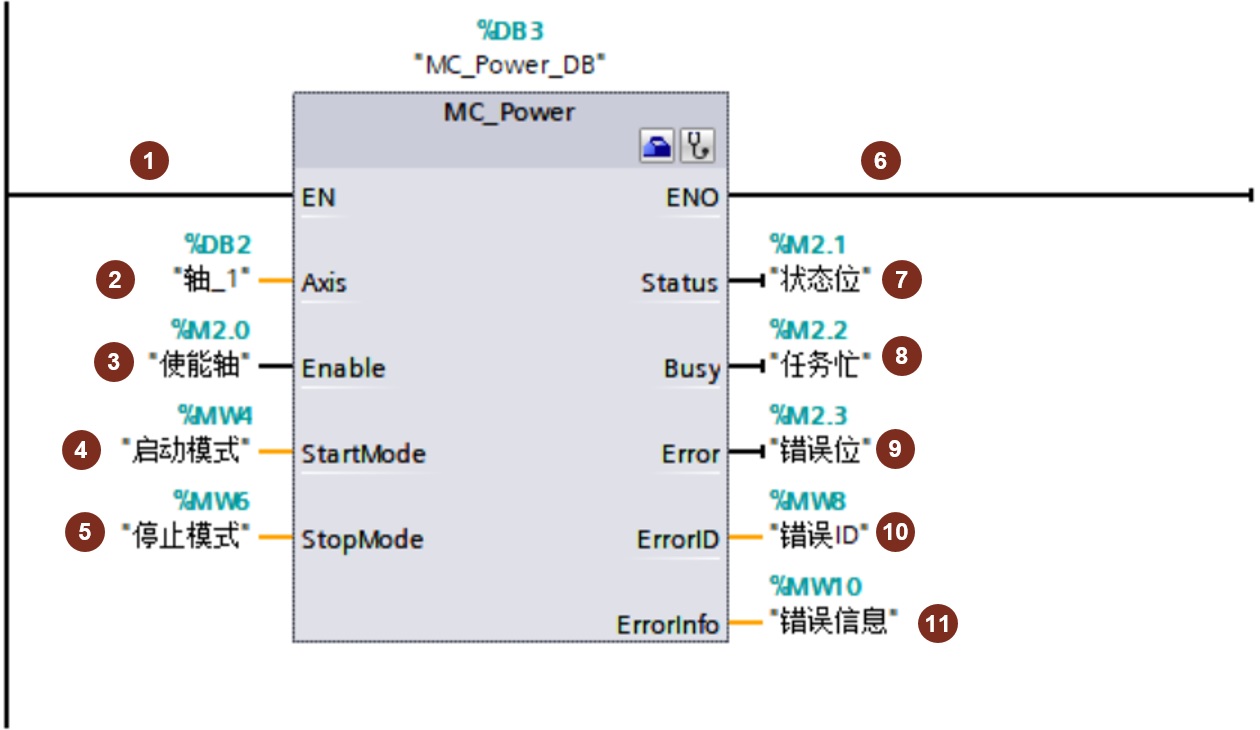
输入端:
①EN:该输入端是MC_Power指令的使能端,不是轴的使能端。
MC_Power 指令必须在程序里一直调用,并保证MC_Power指令在其他Motion Control指令的前面调用。
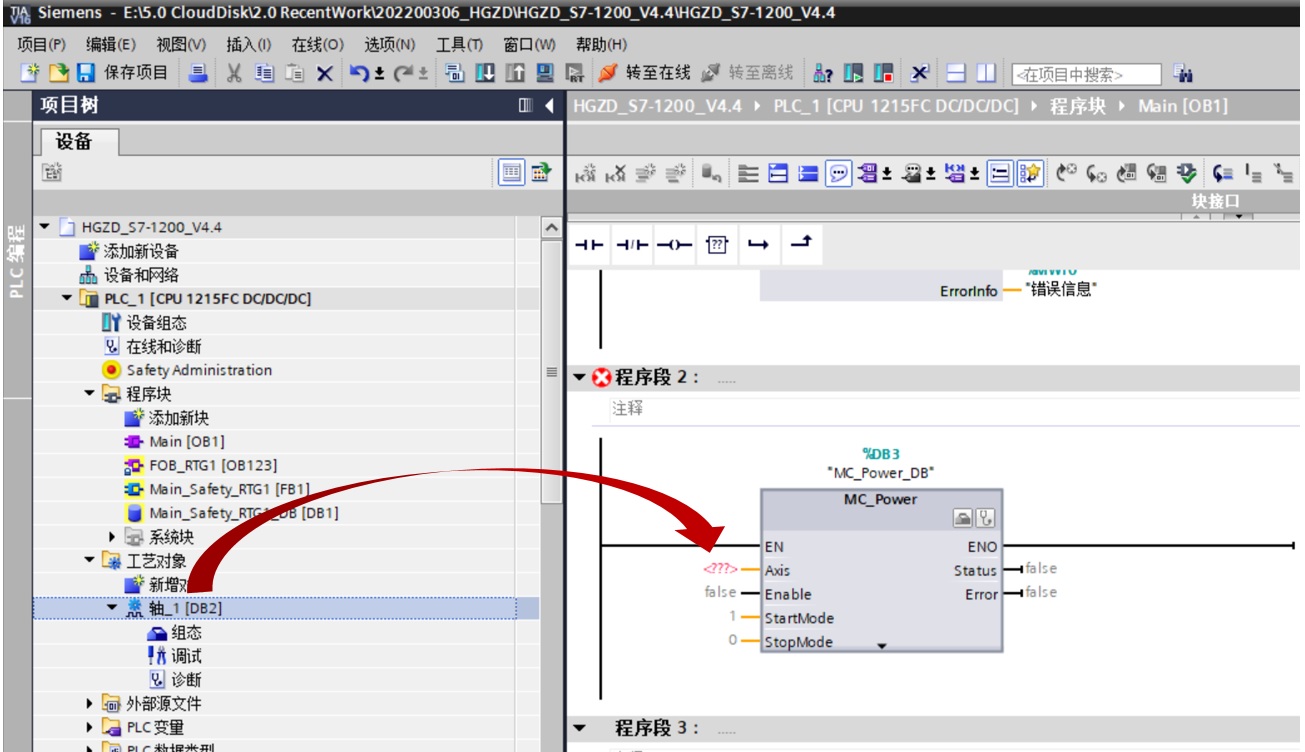
②Axis:轴名称
可以有几种方式输入轴名称:
a. 用鼠标直接从Portal软件左侧项目树中拖拽轴的工艺对象,如下图所示:
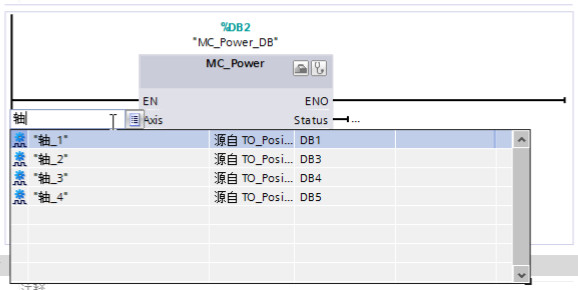
b. 用键盘输入字符,则Portal软件会自动显示出可以添加的轴对象,如下图所示:
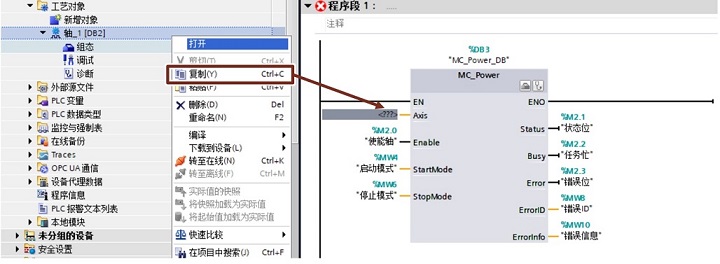
c. 用拷贝的方式把轴的名称拷贝到指令上,如下图所示:
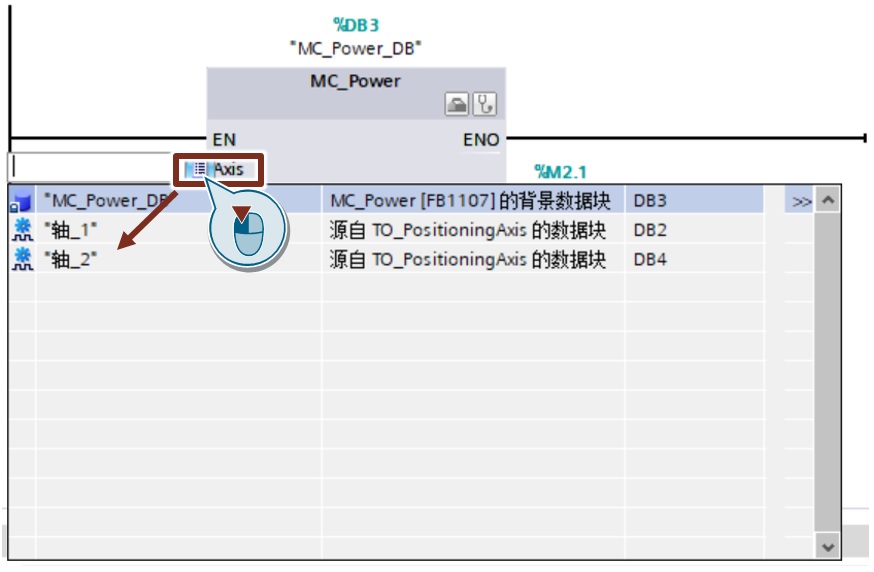
d. 还可以用鼠标左键点击“Aixs”,系统会出现带可选按钮的白色长条框,这时用鼠标点击“选择按钮”,就会出现下图中的列表。
③Enable:轴使能端
- Enable = 0: 根据组态的“StopMode”中断当前所有作业。停止并禁用轴。
- Enable = 1:如果组态了轴的驱动信号,则Enable=1时将接通驱动器的电源。
④StartMode:轴启动模式
- Enable = 0: 启用位置不受控的定位轴即速度控制模式。
- Enable = 1:启用位置受控的定位轴即位置控制(默认)
注意:
1. 使用带 PTO (Pulse Train Output) 驱动器的定位轴时忽略该参数。
2. 只有在信号检测(False 变为 True)期间才会评估 StartMode 参数。
⑤StopMode:轴停止模式
- StopMode= 0:紧急停止
如果禁用轴的请求处于待决状态,则轴将以组态的急停减速度进行制动。轴在变为静止状态后被禁用。
- StopMode=1:立即停止
如果禁用轴的请求处于待决状态,则会输出该设定值 0,并禁用轴。轴将根据驱动器中的组态进行制动,并转入停止状态。 对 对于通过 PTO (Pulse Train Output) 的驱动器连接:
禁用轴时,将根据基于频率的减速度,停止脉冲输出:
• 输出频率 ≥ 100 Hz
减速度:最长 30 ms
• 输出频率 < 100 Hz
减速度:30 ms;2 Hz 时,最长 1.5 s
- StopMode=2:带有加速度变化率控制的紧急停止:
如果禁用轴的请求处于待决状态,则轴将以组态的急停减速度进行制动。如果激活了加速度变化率控制,会将已组态的加速度变化率考虑在内。轴在变为静止状态后被禁用。
输出端:
⑥ENO:使能输出
⑦Status:轴的使能状态
⑧Busy:标记MC_Power指令是否处于活动状态
⑨Error:标记MC_Power指令是否产生错误
⑩ErrorID:当MC_Power指令产生错误时,用ErrorID表示错误号。
⑪ErrorInfo:当MC_Power指令产生错误时,用ErrorInfo表示错误信息 。
结合ErrorID和ErrorInfo数值,查看手册或是Portal 软件的帮助信息中的说明,来得到错误原因。

- 评论
















扫码分享