

















 西门子官方商城
西门子官方商城
- 自动化系统
- 驱动技术
- 低压电气
- 工业服务
- 其他
更多
常问问题  5.0 分
5.0 分
使用PID 程序块 FB58 “TCONT_CP” 脉冲输出时需要注意什么?
文档编号:F1043|
文档类型:常问问题|
发布时间:2024年01月19日
- 0
- 585
- 1197
说明 FB 58 “TCONT_CP”用于使用连续或脉冲控制信号来控制温度过程。脉冲控制功能使用脉宽调制,将模拟量可调节变量值 LMN 转换成一系列周期为PER_TM 的脉冲信号。通过设置PULSE_ON=TRUE 激活PULSEGEN,并在CYCLE_P 周期中对其进行处理。 哪些参数决定脉冲输出的周期? 首先,需要熟悉几个FB 58 “TCONT_CP” 脉冲输出的重要参数: ......
说明
FB 58 “TCONT_CP”用于使用连续或脉冲控制信号来控制温度过程。脉冲控制功能使用脉宽调制,将模拟量可调节变量值 LMN 转换成一系列周期为PER_TM 的脉冲信号。通过设置PULSE_ON=TRUE 激活PULSEGEN,并在CYCLE_P 周期中对其进行处理。
哪些参数决定脉冲输出的周期?首先,需要熟悉几个FB 58 “TCONT_CP” 脉冲输出的重要参数:
- CYCLE_P : 脉冲发生器的采样周期
- CYCLE:PID 运 算的采样周期
- PER_TM: 脉冲输出的周期如图1,PID输出LMN变 量为30.0,CYCLE=PER_TM=10 *CYCLE_P ,则 每个PER_TM循 环时间调用SFB/FB“PULSEGEN”10次, 则:
- 脉宽=PER_TM x LMN%
- 对 于前3个SFB/FB“PULSEGEN”(10次 调用的30 %), 输出“QPOS”为“1”
- 对 于其余7个SFB/FB“PULSEGEN”(10次 调用的70 %), 输出“QPOS”为“0”
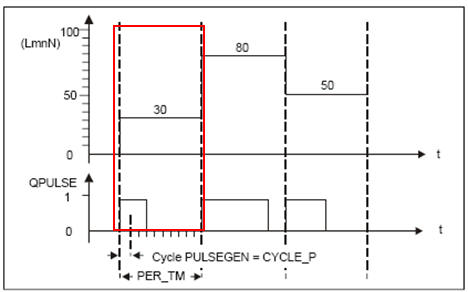
图01
如图2,设置参数,LMN=50.0。根据上图的关 系,理 论上输出的脉冲周期应该为10秒。但是通过 WINCC 捕捉的脉冲轨迹可以看到,实际的周期为20秒,如图2。那这是为什么呢?
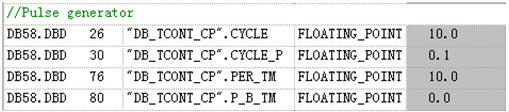
图02
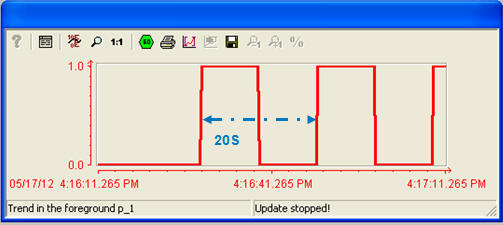
图03
其实,参数 PER_TM 和CYCLE_P 只是决定了脉宽调制精度G,G=PER_TM/CYCLE_P 。脉 宽调制精 度,决 定了一个脉冲周期内执行的脉冲计算的次数,次数越多精度越高。如图4,FB 58 “TCONT_CP” 通过“SELECT” 参数决定PID 运算和脉冲运算的关系,通常我们使用默认的模式,也就是同一个FB 58 “TCONT_CP” 执行两者,因此在同一个循环中断中执行的FB 58 “TCONT_CP”,每次循环中断进入都会执行脉冲运算,而PID 运算和脉冲运算成1:G 关系。因此实际脉冲运算的周期 CYCLE_P* 是由程序块执行的间隔决定的,所以实际周期 PER_TM*=CYCLE_P * x G。
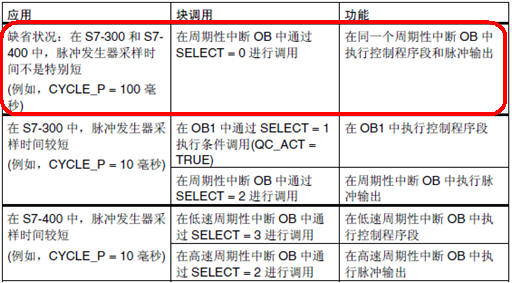
图04
在上面的例子中,G = PER_TM / CYCLE_P =10/0.1=100;OB35循 环周期200MS, 所以CYCLE_P * =200MS ,PER_TM* =100X200=20S。因此,要想脉冲输出的周期和设置的一致,必须保证 CYCLE_P=CYCLE_P *(循环中断的时间) 我们只需要调整OB35的循环中断时间到 100MS,就可以实现10S周期的脉冲,如图5。
图05
经验关系时间法则如 下:
- CYCLE_P<=PER_TM/50
- PER_TM<=TI/5
- CYCLE<=TI/10
- CYCLE(=N x CYCLE_P)=<PER_TM;N 为整数
- P_B_TM>=CYCLE_P
如果PID CYCLY和周期PER_TM不同会怎么样?可以为CYCLE 选择一个小于脉冲重复周期PER_TM 的数值。此设置适用于需要尽可能高的脉冲重复周期以减小执行器上的磨损,但快速过程需要的采样时间却又比较短。如果CYCLE< PER_TM,意味 着一个完整周期还没有结束,新的 PID 结果将会产生,脉冲的输出状况将会改变。

图06
如 图7,CYCLE<PER_TM,当前输出LMN=50.0,周期20S。一旦 PID 的结果发生更改,如图8,当脉冲高电平输出到20%时,新的 PID 结果LMN=80.0 到来,则脉冲会在之前的基础上继续输出余下的60%的高电平后再变为低电平,整个周期仍然保持20S。

图07
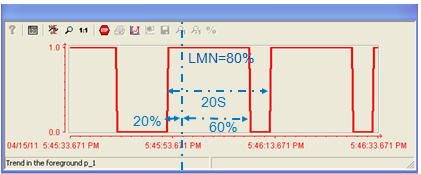
图08
如果新的PID 的结果发生在脉冲的高电平,则会有以下两种情况(黄色箭头:已经输出的高电平脉冲;绿色箭头:新的 PID 结果):
- PID 结果>当前脉冲长度,则脉冲延长
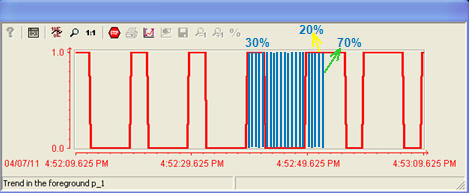
图09- PID 结果<当前脉冲长度,则脉冲终止
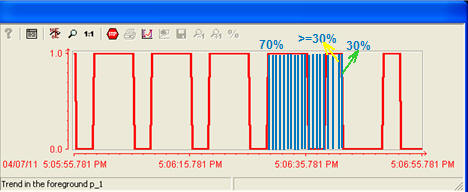
图10
如果新的PID 的结果发生在脉冲的低电平,则会有以下两种情况(黄色箭头:已经输出的低电平脉冲;绿色箭头:新的 PID 结果)::- 100-PID 结果<=当前低电平脉冲长度,则输出高电平脉冲
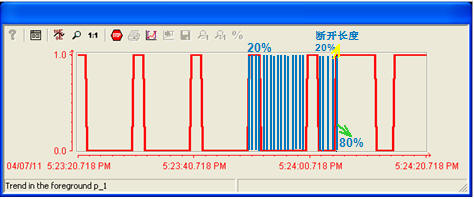 图11
图11
- 100-PID 结果>当前低电平脉冲长度,则低电平脉冲延长
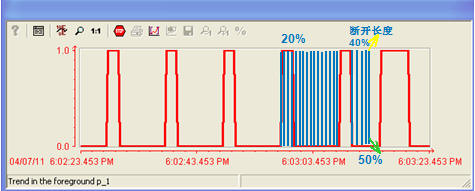
图12


- 评论








 关联文档
关联文档
- 在虚拟机中安装 STEP 7 (TIA Portal) 时需要注意什么?
- 当在多核或多处理器的计算机上和 Microsoft SQL Server 2005/2008 一起运行 SIMATIC WinCC 或 SIMATIC PCS 7 时需要注意什么?
- 当在多核或多处理器的计算机上和 Microsoft SQL Server 2005/2008 一起运行 SIMATIC WinCC 或 SIMATIC PCS 7 时需要注意什么?
- SITRANS P320/P420 选型时需要注意什么?
- 使用GSD文件进行DPV0和DPV1从站的配置时需要注意些什么?
- 在IWLAN 产品SCALANCE W及IWLAN/PB Link PNIO上使用C plug 卡时需要注意些什么?
- 配置CP343-1 Advanced作为IO Device需要注意什么
- 在 STEP 7 (TIA Portal)中将S7-1200 V3更换为S7-1200 V4需要注意什么?
- SINAMICS G120: 用控制单元CU240B-2, CU240E-2或CU250S-2替换控制单元CU240E 或 CU240S 时,需要注意什么?
- 故障安全控制器 S7-1200 和 S7-1500 使用组态控制(选件处理)时要注意什么?
 看过该文档的用户还看过哪些文档
看过该文档的用户还看过哪些文档


隐私政策更新提示
欢迎您来到西门子数字化工业支持中心网站!我们使用cookies来确保您能最好地使用我们的网站,进行网站分析并根据您的兴趣定制内容。我们有时会与第三方共享cookie数据。继续浏览本网站,即表示您同意我们使用cookies。您亦可以参考西门子数据隐私政策以了解更多相关信息。
同意并继续浏览















扫码分享