

















 西门子官方商城
西门子官方商城
- 自动化系统
- 驱动技术
- 低压电气
- 工业服务
- 其他
更多
应用实例与扩展工具  5.0 分
5.0 分
在 SIMATIC F-CPU 上分布式使用安全激光扫描器,并采用 F-CPU 切换监控盒
文档编号:58804919|
文档类型:应用实例与扩展工具|
发布时间:2023年12月13日
- 0
- 207
- 970
本应用示例实现了对两个不断变化的危险区域的监控。基于分布式技术,SICK 安全激光扫描器通过 PROFINET 连接至 SIMATIC F-CPU。
带机器人的装配单元具有两个工作站,操作员可自由地进行交替访问。操作期间,情况会根据机器人的运动发生变化:危险区域变成工作区域,反之亦然。
我们定义了以下监视情况:
- 情况 1:当机器人在站 1 工作时,操作员可以在站 2 进行加载或卸载。
- 情况 2:当机器人在站 2 工作时,操作员可以在站 1 进行加载或卸载。

要监视该装配单元,SICK 安全激光扫描仪 S3000 需与故障安全 SIMATIC S7-1500 (F-CPU) 结合使用。
激光扫描仪可根据机器人的位置监视危险区域,并在机器人进入保护区域后关闭其安全 OSSD 输出(输出信号切换装置),从而使 F-CPU 关闭机器人。
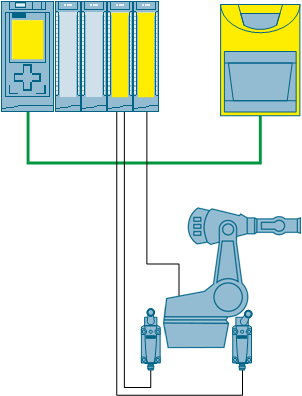
F-CPU 和激光扫描仪可通过 PROFINET 与错误安全“PROFIsafe”配置文件进行通信。可通过两个传感器(例如 SIRIUS 位置开关)来检测机器人位置。
下载 文档 (1.0 MB)
文档 (1.0 MB)
TIA Portal V13 SP1 的项目示例,SICK S3000 的配置文件 (12.8 MB)
归档用于 S7-300 和 TIA Portal V11 的文档 V1.0 (1.4 MB)
用于 S7-300 和 TIA Portal V11 的项目示例 V1.0 (2.3 MB)
SICK S3000 的配置文件 V1.0 (7.5 KB)
上次更改
重新添加的应用示例 V1.0 的附件
其它关键词
区域设置,警告区域,保护区域,Safety Advanced
https://support.industry.siemens.com/cs/cn/zh/view/58804919


- 评论








 关联文档
关联文档
- 使用DP/DP 耦合器在不同F-CPU之间进行安全通信时要注意什么?
- 安全集成扩展功能故障安全驱动器,通过使用 TM54F 的 EPOS 和 F-CPU 控制 CU320
- 实现F-CPU之间安全相关的控制器-智能设备通信
- 通过DP/DP耦合器实现F-CPU之间安全相关主站与主站通讯( STEP7版本)
- 通过DP/DP Coupler实现 F-CPU之间安全相关的主站与主站通讯(V11版本)
- 通过PN实现 F-CPU之间安全相关的S7通讯(V11版本)
- 通过STEP7 V11软件实现 F-CPU之间安全相关的DP主站与智能从站通讯
- 通过PN/PN耦合器实现F-CPU之间安全相关控制器与控制器通讯(STEP7)
- F-CPU之间安全相关的控制器-智能设备通信(Portal V11)
- 通过STEP7 实现F-CPU之间安全相关智能从站与智能从站通讯
 看过该文档的用户还看过哪些文档
看过该文档的用户还看过哪些文档


隐私政策更新提示
欢迎您来到西门子数字化工业支持中心网站!我们使用cookies来确保您能最好地使用我们的网站,进行网站分析并根据您的兴趣定制内容。我们有时会与第三方共享cookie数据。继续浏览本网站,即表示您同意我们使用cookies。您亦可以参考西门子数据隐私政策以了解更多相关信息。
同意并继续浏览















扫码分享