1 概述 在S120多传动控制系统中,由于一个CU控制单元需要控制多个驱动轴,若其中某一驱动轴或驱动轴内的某一模块出现故障,虽然不会影响其他驱动轴的运行,但该故障将会一直存在,导致该驱动轴不能工作。若希望故障不再显示,或将故障的驱动轴取下维修,而不影响其他驱动轴的工作,则需要用到以下介绍的功能。 ......
1 概述
在S120多传动控制系统中,由于一个CU控制单元需要控制多个驱动轴,若其中某一驱动轴或驱动轴内的某一模块出现故障,虽然不会影响其他驱动轴的运行,但该故障将会一直存在,导致该驱动轴不能工作。若希望故障不再显示,或将故障的驱动轴取下维修,而不影响其他驱动轴的工作,则需要用到以下介绍的功能。
2 Parking 功能
Parking 功能包括:Parking驱动轴和Parking编码器两种方式。
2.1 Parking 驱动轴
Parking驱动轴是通过参数设置,使驱动轴处于暂停状态。该功能常用在:当一驱动轴出现故障,希望故障不再显示,且使驱动轴处于可以随时被移除的状态。若需要移除维修,在没有DMC20的情况下,不能热插拔,需要断电后才可以移除。
1) Parking驱动轴的实现:通过参数P0897=1 或控制字STW2.7=1 实现。相反若要取消驱动轴的Parking功能,将P0897=0 或STW2.7=0即可。通过参数r0896.0 或状态字ZSW2.7 可以查到其状态,当r0896.0=1或ZSW2.7=1表示处于Parking状态。2) Parking驱动轴的实现条件:驱动轴在被Parking前必须通过控制器停止轴,使其处于静止状态。若是OFF1/OFF3停车,则驱动轴必须停止后才能实现Parking功能。若是出现故障,或其他方式的OFF2停车,则在Parking命令存在的前提下,驱动轴会立即实现Parking功能,且Parking后该驱动轴之前产生的故障信息可以被确认。3) 驱动轴Parking后的特点:• 通过该驱动轴的DRIVE-CLIQ通讯仍处于正常状态。• 分配在该驱动轴下的编码器和电机模块的监控都被抑制,通过参数r0146[0]=0 、r0126=0 可以查到其状态。但没有分配该驱动轴下的测量系统仍处于激活状态,通过r0146[n]=1查到。• 若将Parking的对象移除,在没有DMC20下,会出现“驱动对象未准备好”A01315、和“拓扑对比不一致”A01481/A01482 报警。• 通过参数设置可以激活被Parking的驱动轴,驱动轴自动集成到原来的拓扑图中,恢复正常。• 驱动轴所属的驱动轴对象仍处于激活状态,通过r0106=1可以验证。
2.2 Parking 编码器
Parking编码器是通过参数设置,使该编码器处于暂停状态,该功能常常用在:当一编码器出现故障,希望故障不再显示,且使编码器处于可以随时被移除的状态。对应的驱动轴可以使用该轴下连接的其他编码器。若需要移除维修,在没有DMC20的情况下,不能热插拔,需要断电后才可以移除。
1) Parking 编码器的实现:通过参数P480.14=1或编码器控制字Gn_STW.14=1实现。相反若要取消编码器的Parking功能,将P480.14=0或Gn_STW.14=0即可。通过参数r481.14或编码器的状态字Gn_ZSW.14可以查到其状态,当r481.14=1或Gn_ZSW.14=1表示该编码器处于Parking状态。2) Parking编码器的实现条件:该编码器在被Parking前,必须通过控制器停止对应的驱动轴,使其处于静止状态。3) 编码器被Parking后的特点:• 监控该编码器的状态被抑制,可以通过参数r0146=0可以查到其状态。• 但该驱动轴下的电机模块仍处于激活状态,即通过参数r0126=1可以查到其状态。• Parking轴/编码器取消后, 更换新的编码器必须确定偏移角和重新回参考点。• 通过重新激活被Parking的编码器,该编码器会自动集成到原来的拓扑图中。
2.3 Parking 驱动轴示例
如图1所示:当驱动轴2(对应M2电机) OFF1停止后,可以将驱动轴2设置成Parking状态,设置驱动轴2的参数P0897=1。则该驱动轴的r0896.0=1表示其处于Parking状态,分配在该驱动轴下的电机模块2、编码器E3、电机M2和编码器的转换模块SMCXX3的监控都被抑制。此时可以移除轴2,Gn_ZSW.14=1表示该驱动轴下的编码器也自动处于Parking状态,r0126=0表示该驱动轴处于不激活状态、r0146=0表示该驱动轴下的编码器处于不激活状态。各信号的时序图如图2所示。驱动轴2被Parking后,驱动轴1和驱动轴3仍处于正常的运行状态。修好后取消Parking。

图1.

图2.
2.4 Parking 编码器示例
如图1所示的控制结构:当驱动轴2 OFF1停止后,可以将驱动轴2 所带的E3编码器Parking,设置驱动轴2的参数P480.14=1。则该驱动轴的编码器参数r481.14=1表示编码器处于Parking状态,r0146=0表示编码器处于不激活状态。具体波形如图3所示。修好后取消Parking,则可以自动恢复工作。

图3.
3 Deactivating 功能
Deactivating/Activating功能是指禁用/激活驱动轴、功率单元或编码器接口。
3.1 Deactivating 驱动轴
1) Deactivating 驱动轴的功能介绍:该功能包括以下两种情况:• P0105=0指取消已存在的驱动轴的功能:该功能指当驱动轴在完全调试后若出现故障,可以通过设置该值,从而将驱动轴移除而不会出现错误。当备件来后或驱动轴维修好后,再将其激活P0105=1即可。• P0105=2指取消不存在的驱动轴的功能:该功能可以应用在项目中可能需要某个驱动轴,但目前没有或不需要。则可以先在Starter的离线状态下预配置该驱动轴,并将该驱动轴设置为该值,从而不影响其他驱动轴的正常运行。以后若需要,只要将P0105=1,将其激活即可。2) Deactivating 驱动轴的特点:• 只有驱动轴停止后才能取消激活。• 取消激活驱动轴后,分配该驱动轴下的所有部件都将处于Parking状态。• 若其他驱动轴与被取消激活的驱动轴之间有BICO连接,则其他驱动轴会出现A01507的报警。故建议需要取消激活的驱动轴与其他驱动轴之间最好没有BICO连接。
3.2 Deactivating 其他模块
通过参数P0125=0可以取消激活功率单元即电机模块。取消激活功率单元后,功率单元也会处于Parking状态。使用该功能需要将轴停止后才能实现。且P0125=1重新激活其工作。
通过参数P0145=0可以取消激活编码器接口。取消激活编码器接口后,编码器也会处于Parking状态。使用该功能需要将轴停止后才能实现。且P0145=1重新激活其工作。
3.3 Deactivating驱动轴示例
1) Deactivating驱动轴1的过程:• 在断电条件下,移除“驱动轴1”硬件并相应的修改 DRIVE-CLIQ 的接线如图5。• 上电之后,“驱动轴1”被指示为:“尚未准备就绪”的报警消息A01315和A01481;“BICO 连接连接到未激活的对象”的报警消息A01507;“组件丢失” 故障F07800。• 通过P9495=1 保存指定的 BICO 连接,通过 P0105=0 禁用驱动器对象“驱动轴1”。报警消失。• 执行 RAM à ROM 复制操作,其他驱动轴能正常工作。• 若先设置P0105=0 、P9495=1,执行 RAM à ROM 复制操作。再在断电条件下,移除“驱动轴1”,则不会出现以上的报警。通过Deactivating驱动轴1后,拓扑结构由原来的图4变成图5。2) 重新Activating驱动轴1的过程:• 在断电条件下,安装“驱动轴 1”硬件,并相应的修改 DRIVE-CLIQ 的接线如图4。• 上电后,“驱动轴 1”的新序列号被复制到设置拓扑中(若 P9909=1)。出现“对象未激活和未准备就绪” A01316和“中断的 BICO连接”A01507的报警消息。• 通过 P0105=1 激活 “驱动轴1”,使用 P9496=1 重建 BICO 连接。• 执行 RAM àROM 复制操作。此时所有的驱动轴都能正常工作。通过Activating驱动轴1后,拓扑结构由图5变成原来的图4 。
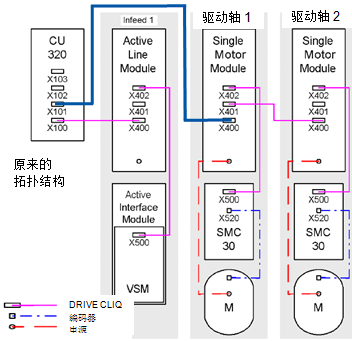
图4.
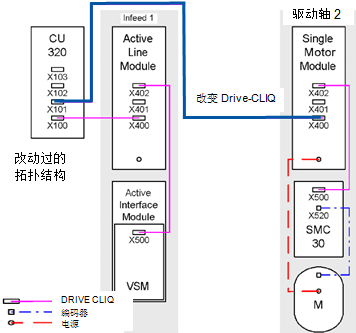
图5.
4 Parking和Deactivating功能的比较
4.1 两者的相同点
1) 两者都可以使驱动轴或某一模块处于停止被CU控制单元监控的功能。2) 两者功能实现的条件都一样:先停止驱动轴。4.2 两者的不同点1) Parking功能的参数设置可以通过BICO实现,更方便周期通信方式,而Deactivating是通过直接设置值实现的,只能通过非周期通信方式实现。2) Deactivating有禁用不存在的驱动轴的功能;而Parking无此功能。3) Deactivating 驱动轴对象,则该轴的所有模块都自动处于Parking状态,而Parking驱动轴后,只有编码器和电机模块处于Parking状态,而驱动轴对象仍处于激活状态。故从某种意义上看,Deactivating 驱动轴对象的范围比Parking驱动轴的广。4) 当移除被Parking的对象后,会出现报警,而Deactivating则不会。
5 使用Parking或Deactivating功能和DMC20 /DME20实现热插拔
5.1 热插拔功能介绍
1) 热插拔功能:采用该功能可以使轴或部件从运行的系统中移除。2) 热插拔实现的条件:• 在移除前必须先Deactivating/parking 轴。• 必须通过DMC20/DME20 构成星形的拓扑结构。• 系统不支持以下DRIVE-CLIQ链路中移除部件:如传感器/TM端子模块从电机模块的DRIVE-CLIQ链路移开,或电机模块从另一电机模块DRIVE-CLIQ的链路移开。• 若需要热插拔整个轴,则需要独立的断路器与直流母线断开连接。
5.2 热插拔示例
如图6所示,若驱动轴6与驱动轴1-5和驱动轴7是独立的整流单元提供。则当驱动轴6出现故障之后,希望热插拔整个轴,实现的步骤如下:
1) 首先Parking驱动轴6,即P0897=1。也可以Deactivating轴,即P0105=1。2) 若是Parking驱动轴6后必须重新升级拓扑,否则会出现“尚未准备就绪” A01315和“拓扑比较不一致”A01481/A01482的报警消息。3) 直接热插拔整个轴6,其他轴的运行状态不受影响。
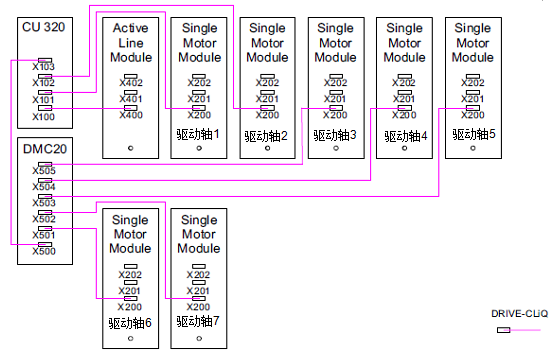
图6.
说明:SINAMCS S120 FW2.5 SP1 以后的版本都具有这些功能。
关键词
Parking、Deactivating、DMC20、热插拔
您可以前往全球资源库查看此文档


















 西门子官方商城
西门子官方商城












 关联文档
关联文档

















扫码分享