SINAMICS G120系列变频器做为西门子通用型变频器产品中的一种,在市场上一直有着非常广泛的应用,随着行业应用的不断拓展, G120系列变频器也逐渐具有了故障安全功能。本文将主要介绍G120变频器的故障安全功能的调试和使用方法。
1 SINAMICS G120 故障安全型变频器的硬件
G120变频器包括支持DP接口和PN接口两种,其中G120D具有高防护等级(IP67)的特性,它们的安全功能基本都类似:
1)SINAMICS G120 CU240S DP F (6SL3244-0BA21-1PA0)
2)SINAMICS G120 CU240S PN F (6SL3244-0BA21-1FA0)
3)SINAMICS G120D CU240D DP F (6SL3544-0FA21-1PA0)
4) SINAMICS G120D CU240D PN F (6SL3 544-0FA21-1FA0)
硬件的版本为到目前为止最高版本V3.2。
2 组态PLC
2.1 软件需求
我们通过一个实例来介绍如何在STEP7中组态G120变频器模块。
所需软件:
- STEP7 V5.4 SP3或以上版本
- Distributed safety V5.4 SP4或以上版本
- Drive ES V5.4以上版本(或Scout/Starter)
2.2 STEP7项目组态和设置
1)硬件组态
首先在STEP7中建立一个S7 300项目,在实际硬件中,我们采用了带PN接口的G120模块,因而需要组态Profinet网络。
图1 新建S7 300项目
在硬件组态中,选择CPU317F-2PN/DP做为F的主站,添加一条以太网,在硬件列表中选择“PROFINET IO” ® “SINAMICS G120” ® “SINAMICS G120 CU240S PN F”,用鼠标点中将其拖拽到以太网上,同时将“PROFIsafe”报文添加到G120的硬件插槽中(图2)。
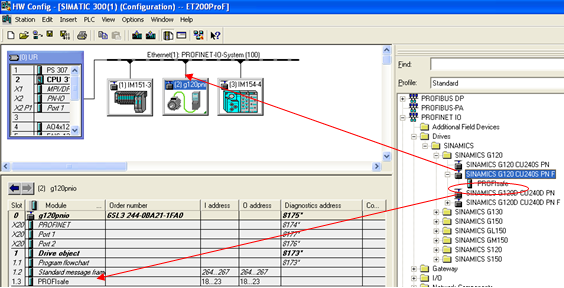
图2 将G120添加到项目中
2) 组态网络
双击G120为其分配设备名(g120pnio)和IP地址(192.168.0.3)。其中设备名必须与实际连接的G120的设备名一致,否则将无法进行下载(图3)。
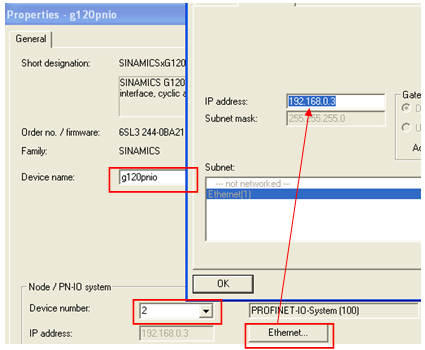
图3 为G120的PN口分配IP地址和设备名
3) 故障安全参数设置
双击G120硬件组态1.3槽中的“Profisafe”,打开属性设置(图4)。
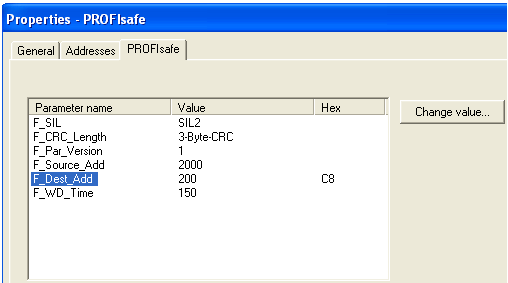
图4 Profisafe属性设置
其中:
F_SIL:表示系统能够达到的安全等级;
F_Source_Add:F系统主站的“源地址”,一般采用默认值即可;
F_Dest_Add:F系统目的站的地址,一般采用默认值即可,该值需要与G120的实际值相对应,可通过参数P9810在G120上设定;
F_WD_Time:F系统的看门狗时间,一般至少应大于OB35的循环中断时间(建议设置在300ms以上);
4) F-CPU的参数配置
双击CPU,打开属性页面。首先选择“F Parameters”属性页,为安全程序设置密码。该密码防止了F程序被没有授权的用户随意修改(图5)。
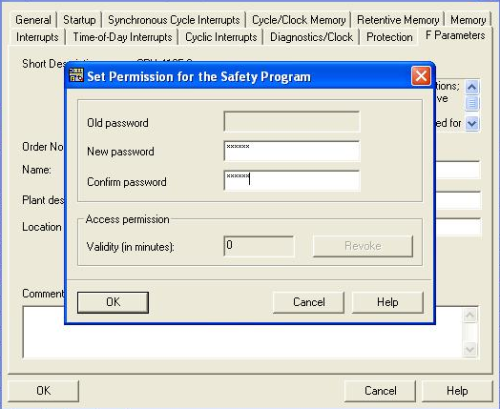
图5 为F程序设置密码
密码设置后,点击“OK”,可以看到F参数。这些参数是CPU处理F程序时的基本信息,一般是系统自动分配的,不建议做修改,选择确认即可。
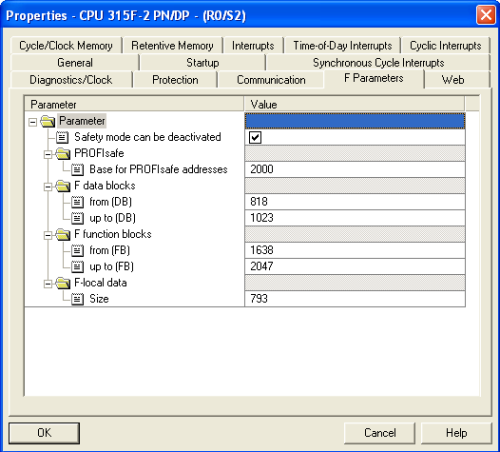
图6 CPU的F相关系统参数
接下来在“Protection”属性中,设置程序的读/写保护,同时将“CPU contains safety program”激活(图7)。
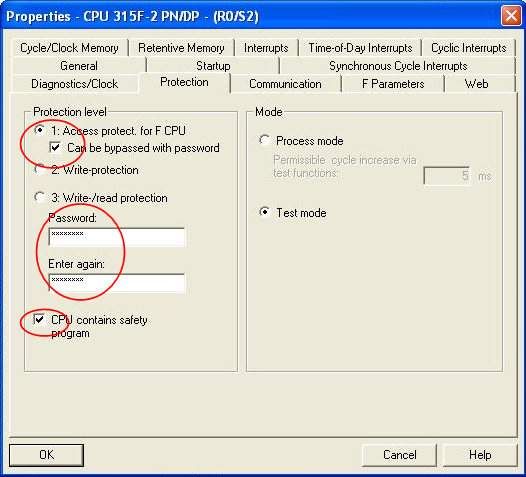
图7 设置CPU读/写密码保护
配置结束后,选择“存盘/编译”。
图8 存盘编译
2. 3 G120的参数设置
(1)编译后的S7项目下,出现了G120设备,其设备名为“g120pnio”,双击“Commissioning”,打开G120的调试界面(图9)。
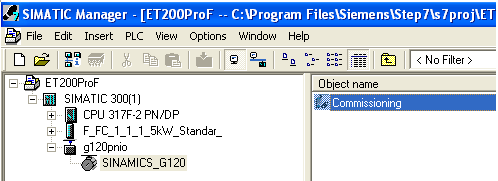
图9 双击打开G120调试界面
(2)系统将启动SIMOTION SCOUT(或者DriveES / Starter)。
首先选择接口设置,否则软件可能无法与G120正常连接(图10)。
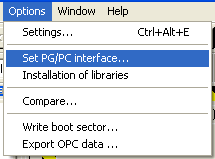
图10 设置连接接口
这里采用的以太网的连接方式。
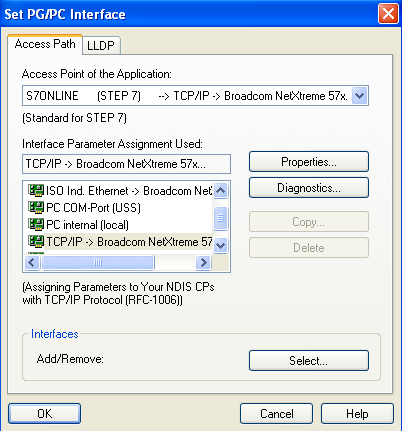
图11 设置PG/PC 接口
(3)在Scout软件中,选择在线“online”,连接到G120。

图12 选择在线功能
至于如何配置驱动,这里不再详细介绍,请参照有关G120的调试手册。
G120的安全功能只有在“Online”状态下才可以进行调试。
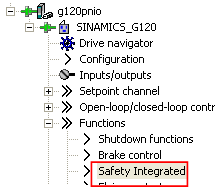
图13 打开安全功能调试界面
选择“Safety Integrated”,设置故障安全功能的参数。
2. 4 故障安全功能调试
2.4.1 安全功能选择
G120 F提供了STO/SS1/SLS/SBC等安全功能,这些安全功能可以通过端子或者Profisafe协议来控制。在“Enables”属性页中,可以通过P9603/P9803选择安全功能的激活方式(图14)。
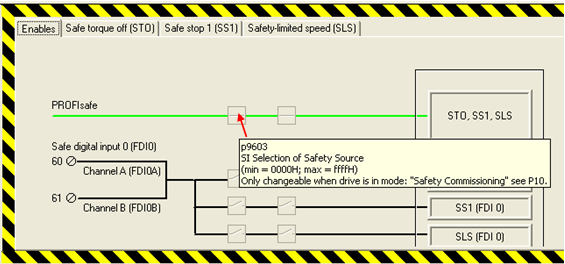
图14 通过P9603选择安全功能激活方式
G120的故障安全功能是通过两个处理器进行信号处理的,一个为驱动处理器(P9603),另外一个为通讯处理器(P9803)。G120通过比较这两个处理器的结果对功能进行设置,如果没有错误,则可以正常启动相应的功能,否则进入“钝化”状态。
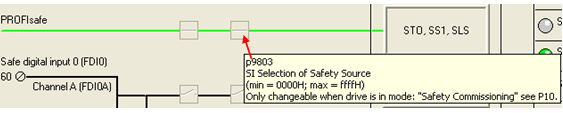
图16 两个处理器进行信号的比较
(1) 对于通过端子实现安全功能,G120F提供了2组双回路的端子,可以连接2个双通道的按钮或者急停开关来实现安全功能的激活(图15),但通过端子控制时只能选择2个安全功能。

图15 G120F故障安全接线端子
当选择通过Porfisafe来激活安全功能时,端子激活的方式将不再能够被选择。
(2) 选中通过Profisafe的报文来控制安全功能后,端子控制的方式将不能再被激活。
2.4.2 安全功能参数设置
选择“Change settings”选项进行参数设定。

图16 选择安全功能设定
1) 安全转矩关断(STO)
当设备出现故障时,安全转矩关断(STO)功能将用于安全的断开电机电源。当选择了该功能时,驱动单元将进入“安全状态”。此时,驱动单元的启动功能被禁止,驱动设备无法在故障状态下被重启,电机进入无转矩自由停车状态。
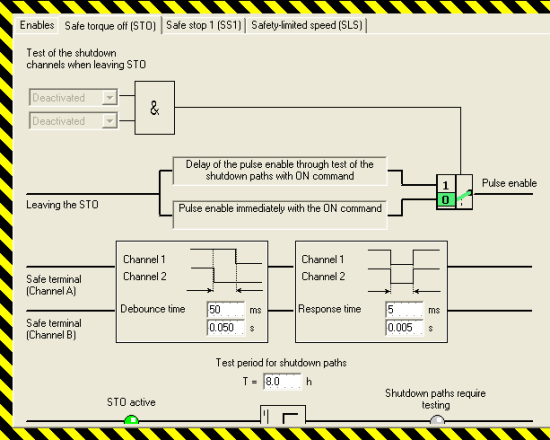
图17 设置STO
 如果采用端子控制方式,则可以对两个输入端子回路进行差异时间的监控(Debounce time),也可以定义最小相应时间来对信号进行滤波(Response time)。
如果采用端子控制方式,则可以对两个输入端子回路进行差异时间的监控(Debounce time),也可以定义最小相应时间来对信号进行滤波(Response time)。
 如果采用Profisafe方式,则可以定义系统在STO结束时的自检过程,以保证系统正常运行 (包括关断测试时间:8 hour) 。
如果采用Profisafe方式,则可以定义系统在STO结束时的自检过程,以保证系统正常运行 (包括关断测试时间:8 hour) 。
 钝化的STO功能(Passivated STO):当系统进入STO过程中(20ms)检测到内部出现故障或者其它过程中检测到故障时,将随时进入PSTO状态,直到所有的故障都被消除后并确认后,系统才可以正常运行。且PSTO拥有最高优先级。
钝化的STO功能(Passivated STO):当系统进入STO过程中(20ms)检测到内部出现故障或者其它过程中检测到故障时,将随时进入PSTO状态,直到所有的故障都被消除后并确认后,系统才可以正常运行。且PSTO拥有最高优先级。
2) 安全停车(SS1)
当“SS1”被激活时,电机转速将按照设定方式的斜坡下降,当在规定时间内(Tr)到达Standstill 设定频率时,进入STO状态。如果超过延时监控时间(Tv),则系统故障,同时进入STO。此时需要将该故障进行“确认”操作,之后系统才可以正常启动。
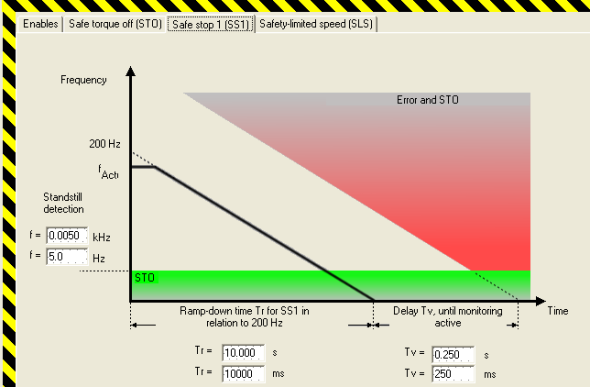
图18 选择安全停车
3) 安全限速(SLS)
安全限速功能(Safely Limited Speed) 用于保护驱动设备在相对安全的速度上运行。G120提供了4种模式的安全限速功能(模式0~模式3)。
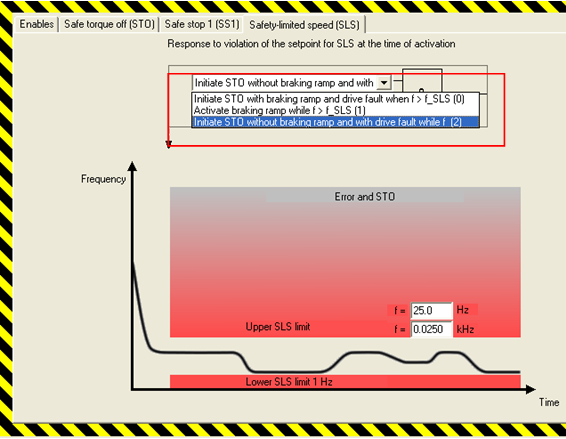
图19 安全限速功能的选择
关于几种模式的功能说明,请参照手册:SINAMICS Function Manual (Firmware V3.2),这里不再一一详述。其中模式3只有V3.2的硬件中才有。
设定结束,选择“Accept settings”。
至此,我们完成G120安全功能的组态,接下来我们通过Profisafe协议来控制S120的安全功能。
2.4.3 程序编制
安全程序的编制和安全功能的调试:
1)首先打开SIMATIC Manager,进入编程界面,选择“Insert new object”“Function”(图20)。
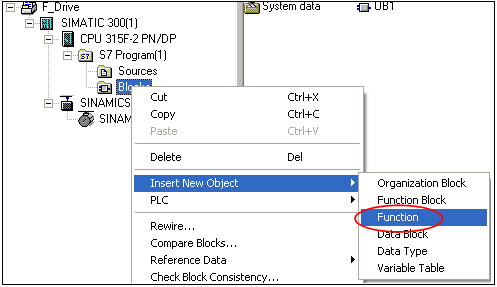
图20 插入新的功能(Function)
2)为新创建的FC选择语言“F-CALL”。这里创建的FC100是用于CPU处理故障安全程序的需要而建立的。
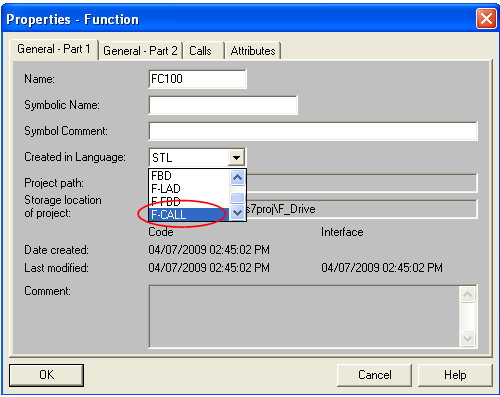
图21 选择创建语言F-CALL
“F-CALL”只是用于CPU调用与安全相关的程序的,但真正的安全程序的语句并不在“F-CALL”里进行编写,需要建立新的F程序编制的功能块。选择新建功能块(图22)。

图22 新建功能块
该功能块(FB1)的创建语言选择“F-FBD”或者“F-LAD”。
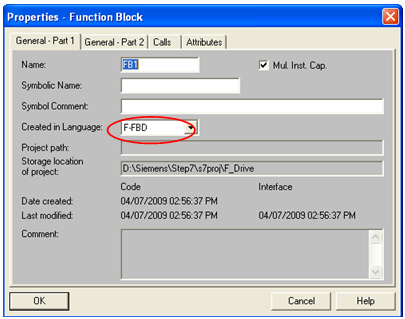
图23 创建程序调用块
一般每个FB都需要一个背景数据块,故障安全型的FB也不例外,因而不要忘记为FB1建立一个背景数据块DB1,当选择该背景数据块为FB1的背景数据块时,可以看到其创建语言自动被系统设定为“F-DB”,(当然,如果选择新建某个FC来做为F程序的调用功能,则不需要建立相应的背景数据块)。
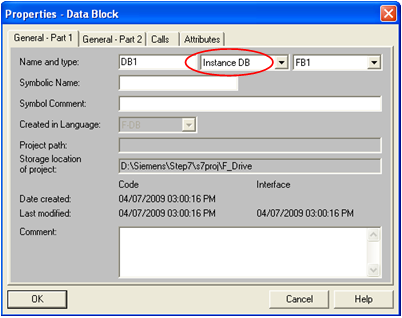
图24 F-FB的背景数据块
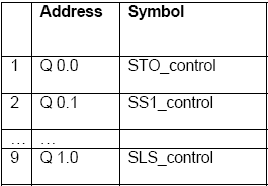
3)由于我们通过之前的硬件组态已经组态了Profisafe的报文,其输入/输出地址分别是地址18..23。
Profisafe报文对应的控制字为:
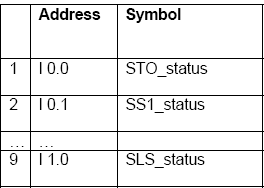
状态字为:
则在FB1 中编程即可:
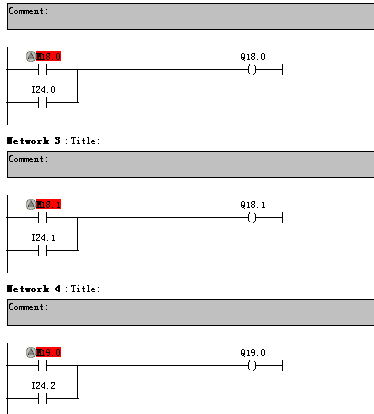
图25 控制字的程序
其中Q18.0、Q18.1和Q19.0分别对应激活STO、SS1和SLS的安全功能(图25);至于故障安全状态,则通过I18.0、I18.1和I19.0进行检测(图26)。
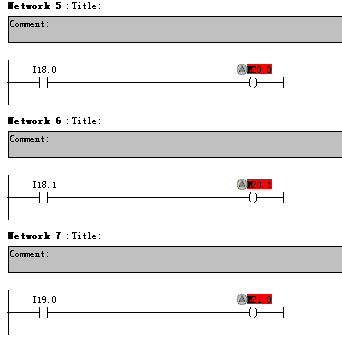
图26 状态字的程序
4)在故障安全系统中,当安全模板发现故障时,系统出于保护的目的,将暂时停止模板的输入输出,也就是将模板“钝化”,此时,模板不能再对程序输出进行响应,直到该故障消失后,经过“去钝”的处理,模板才能被重新集成到控制系统中,因而,当模板被“钝化”后,在程序中需要对模板进行“去钝”处理,否则只能通过将设备断电才能恢复控制功能,当然前提是故障已经消除。
在程序中,可以对模板是否被钝化进行监控。当该模板被钝化后,其对应的数据块自动将“PASSIVATION OUTPUT (2.0)”置位。当故障消除后,将“AKNOELADGEMENT FOR REINTEGRATION(0.2)”置位,则模板被去钝(图28)。
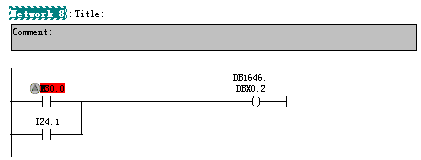
图27 G120的“去钝化”
5)安全程序编制结束后,回到SIMATIC manager界面,选择安全程序的编译。
在编译界面,首先选择“F-Runtime groups”(图28)。
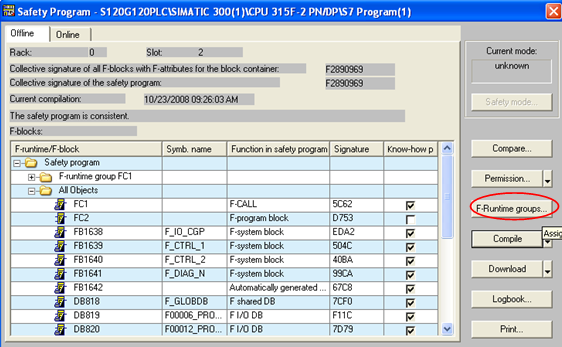
图28 选择F运行组
新建一个安全组。然后选择相应的FB、FC即可。
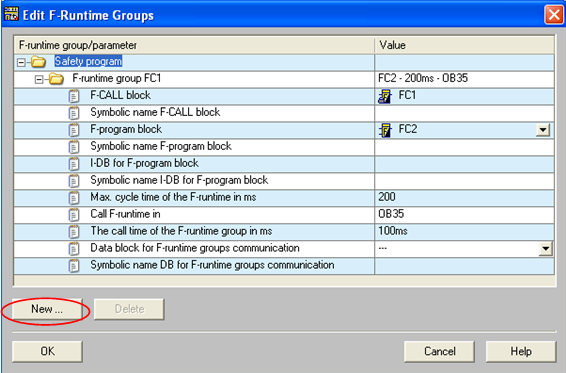
图29 新建安全组
然后选择“Compile”进行安全程序的编译,如果编译正确,则F程序的标签将一致。
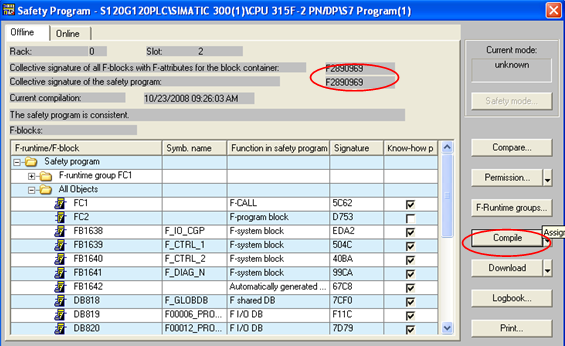
图30 安全程序的编译
注意:故障安全程序在每次修改后,都需要重新进行编译。
6)然后在SIMATIC Manager下新建OB35,在OB35中调用“F-CALL”。
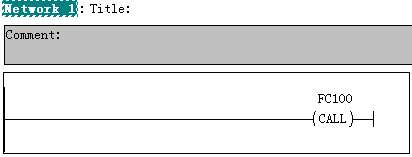
图31 OB35中调用F-CALL
全部程序编制完成后,可以通过硬件组态将硬件组态进行下载,然后必须通过安全Download将安全程序(包括非安全类的程序)进行下载。
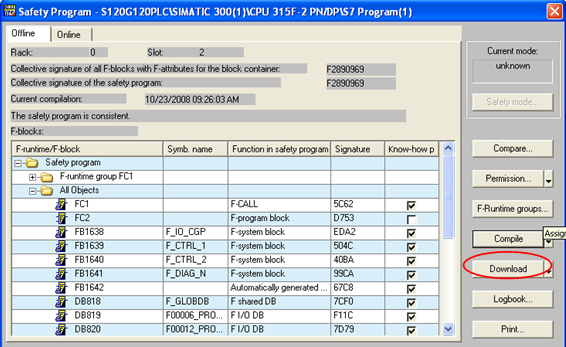
图32 安全程序的下载
程序编译下载后,启动CPU,此时首先可能需要对G120进行一次“去钝化”的操作,然后我们可以通过Profisafe控制激活G120的安全功能。
7)关于G120的“去钝化”
G120做为PN或者DP的从站,当CPU重新上电过程中,一般进行自动去钝的操作;系统运行过程中,如果是故障状态,一般需要进行故障确认,然后进行手动去钝即可重新操作;如果无法故障确认,则需要重新将G120上电才可以重新正常运行。
关键词
故障安全,G120,Profisafe,变频器
您可以前往全球资源库查看此文档


















 西门子官方商城
西门子官方商城









 关联文档
关联文档

















扫码分享