

















 西门子官方商城
西门子官方商城
- 自动化系统
- 驱动技术
- 低压电气
- 工业服务
- 其他
更多

 文档 (2.4 MB)
文档 (2.4 MB)









 关联文档
关联文档
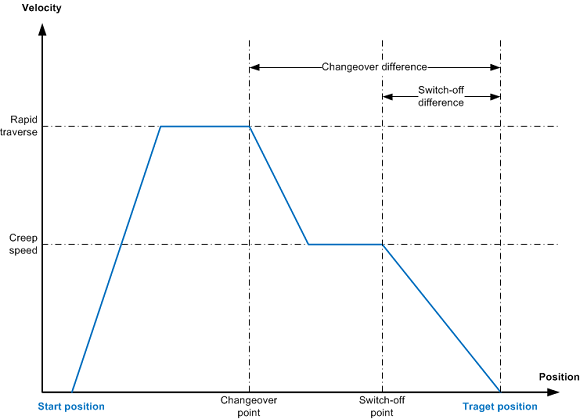
- SINAMICS G120/G120D:以一个传动带应用为例来说明快速移动/缓动切换
- 定位模板EM253快速入门
- S7-1500 Modbus-RTU使用快速入门(更新版)
- 基于SIMATIC S7-300/400 客户端软件包的IEC61850规约通讯快速入门
- 基于SIMATIC S7-300400 服务器软件包的IEC61850通信规约快速入门
- 基于SIMATIC WinCC的IEC61850规约通讯快速入门
- SINAMICS G:使用 S7-1500 (TO) 并通过具有 Safety Integrated 安全功能 (通过端子) 的 PROFINET 或 PROFIBUS 及 HMI 实现 G120 的定位 (Startdrive)
- 使用博途软件实现S7-300/400 PLC对SINAMICS驱动的速度及定位控制
- 在SIMATIC S7-1500 / S7-1200和SENTRON PAC设备之间的Modbus TCP连接时,如何清除错误状态16 # 8382?
- 哪一款SIMATIC和SITOP模块可以作为S7-1500负载电源模块(PM)?
 看过该文档的用户还看过哪些文档
看过该文档的用户还看过哪些文档


隐私政策更新提示
欢迎您来到西门子数字化工业支持中心网站!我们使用cookies来确保您能最好地使用我们的网站,进行网站分析并根据您的兴趣定制内容。我们有时会与第三方共享cookie数据。继续浏览本网站,即表示您同意我们使用cookies。您亦可以参考西门子数据隐私政策以了解更多相关信息。
同意并继续浏览
















扫码分享