

















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
如何通过 SINAMICS Link 实现CU320间的通讯
文档编号:A0556|
文档类型:操作指南|
发布时间:2024年02月05日
- 0
- 1412
- 3682
内容预览:
描述:
本文介绍了如何通过 SINAMICS Link 实现CU320间的通讯
......
1. SINAMICS Link的基本原则
SINAMICS Link 可以实现几个控制单元CU320-2 DP 之间的直接数据交换,但必须安装CBE20选件板。可实现下述应用:
● 多个驱动装置的转矩分配
● 多个驱动装置的设定值层叠
● 物料线的驱动耦合的负荷分配
● 整流单元的主/从控制功能
● SINAMICS DC-MASTER 及 SINAMICS S120的连接
发送及接收数据
常用的节点包括带有CU的驱动单元及连接的驱动对象(DOs)。SINAMICS Link 的报文为16个固定的过程数据空间(PZD),每个PZD 为一个字节长度。不需要的部分填零。

每个节点发送一个16个PZD的报文。一个驱动对象从每个连接的其它DO处最多可以接收16个PZD。可接收或发送单字和双字。双字需要2个连续的PZDs。
传送时间
当使用SINAMICS Link (对于一个控制周期,最大0.5ms;总线周期2.0 ms)时,传送时间可以为3.0 ms。
2. 拓扑结构
对于SINAMICS Link,只允许使用下述的线性拓扑结构:
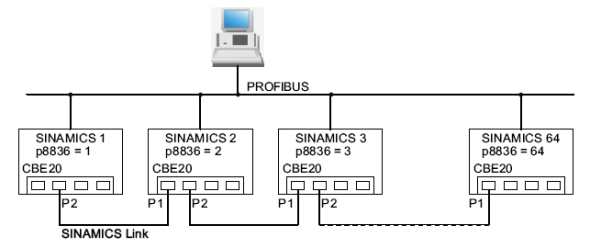
图 1. 最大的拓扑连接
● 不同节点的编号输入到参数p8836[0...63]中。
● 编号要连续,不允许有间隙。
● 同步主的通讯链接节点编号被自动分配为1。
● 当配置通讯时,特殊节点的站名称 (SINAMICSxLINKx001 …SINAMICSxLINKx064) 及 IP 地址 (169.254.123.001 … 169.254.123.064) 通过分配的节点编号被自动设置并且不能被修改。
● 对于CBE20 连接,端口的使用必须按照图1所示。这意味着n节点的 Port 2 (P2) 总是与n+1节点的Port 1 (P1)相连接。
3. 配置及调试
调试
当调试时,对于控制单元应进行如下设置:
● 设置参数 p8835 = 3 (SINAMICS Link).
● 使用参数 p8836,分配节点的节点编号(第一个控制单元总是被分配为编号1)。节点编号为0表示 SINAMICS Link 被关闭。
● 执行掉电再上电。
发送数据
发送数据过程如下:
● 在参数 p2051[x]中,对于每个驱动对象,指定被传送的数据(PZDs)。双字传送必须在
p2061[x] 中指定。
● 在参数 p8871中,对于每个驱动对象,分配发送的参数到它自已节点的发送槽中。双字 (如PZD 2+3) 被分配两个连续传送槽,例如:p8871[1] = 2 ,p8871[2] = 3。
接收数据
数据接收过程如下:
注意:
接收数据的第一个字必须为控制字,其bit 10 必须为1。如果不是此情况,必须设置p2037 = 2不激活bit 10的评估。
● 接收的数据被存贮在参数 r2050[x]/r2060[x]中。
● 被读取的相关PZD的节点地址被定义在参数p8872[0 … 15]中 (0 = 不读取)。
● 在参数 p8870[0 … 15]中,定义从发送报文中读取哪个PZD数据并被存贮在他自已的服务槽中,r2050 用于 PZD 或 r2060 用于双字 PZD (0 = 无选择的 PZD)。
注意:
对于双字,必须读取2个PZD;例如:读一个 32-bit 设定值,位于节点5的PZD 2+3需设置:p8872[1] = 5, p8870[1]= 2, p8872[2] = 5, p8870[2] = 3。
激活
激活 SINAMICS Link 连接,必须对所有的节点执行掉电后再上电操作。不执行掉电再上电时,p2051[x]/2061[x]的分配及读取参数 r2050[x]/2060[x]的链接可被改变分配。
4. 示例
任务:
对2个节点配置 SINAMICS Link并传送下述值:
● 从节点1到节点2传送的数据
– r0898 CO/BO: 驱动对象1的控制字(1 PZD),示例中的 PZD 1
– r0079 CO: 总的转矩设定值(2 PZD) ,示例中的PZD 2
– r1150 CO: 斜坡函数发生器输出的速度设定值(2 PZD) ,示例中的PZD 3
● 从节点2到节点1传送的数据
– r0899 CO/BO: 驱动对象1的状态字(1 PZD),示例中的 PZD 1
设置步骤:
(1). 对于所有节点,设置 SINAMICS Link 模式:p8835 = 3
(2). 对两个设备分配节点号:
– 节点1: p8836 = 1
– 节点2: p8836 = 2
(3). 定义发送数据 (节点1)
– 对于节点1,驱动对象为矢量控制,定义传送的PZD:
p2051.0 = Drive1:r0898,p2061.1 = Drive1:r0079,p2061.3 = Drive1:r1150
– 分配此 PZD 至自已DO的传送缓冲区(p8871):
p8871.0 = 1,p8871.1 = 2,p8871.2 = 3,p8871.3 = 4,p8871.4 = 5
(4). 定义发送数据 (节点2)
– 对于节点2,驱动对象为矢量控制,定义传送的PZD:
p2051.0 = Drive2:r0899
– 分配此 PZD 1 至发送缓冲区(p8871):
p8871.0 = 1
(5). 定义接收数据 (节点1)
– 定义接收缓冲区0,填入来自节点2的数据:
p8872.0 = 2
– 定义保存在此缓冲区中的节点2的 PZD 1:
p8870.0 = 1
– r2050.0 显示节点2PZD 1的值。
(6). 定义接收数据 (节点2)
– 定义接收缓冲区0…4,填入来自节点1的数据:
p8872.0 = 1,p8872.1 = 1,p8872.2 = 1,p8872.3 = 1,p8872.4 = 1
– 定义保存在这些缓冲区中的节点1的 PZD 1…PZD 5:
p8870.0 = 1,p8870.1 = 2,p8870.2 = 3,p8870.3 = 4,p8870.4 = 5
– r2050.0,r2060.1 及r2060.3 中显示来自节点1的PZD 1, PZD2+3 及 PZD4+5的值。
(7). 对于所有的节点,需执行掉电后再上电的操作以激活SINAMICS Link连接。

图2. SINAMICS Link 配置示例
关键词
SINAMICS Link , CU320,通讯

剩余80%未阅读,请登录后下载/查看文档

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






 关联文档
关联文档
- SINAMICS S120:安全集成扩展功能,通过带 PROFIBUS 的 PROFIsafe 激活 CU320 的故障安全驱动
- 如何通过USS协议实现S7-1200 与G120变频器的通信
- 如何通过Modbus RTU协议实现S7-1200 与PAC3200的通信
- 如何通过USS协议实现S7-1200 与MM440变频器的通信
- 怎样激活Sinamics 系列 变频器的控制器CU320自由功能块
- 如何构建DP/PA link及如何组态DP/PA链路器及 DP/PA耦合器?
- 如何由PROFIBUS接口通过SIMATIC站建立PG和通过PROFINET接口的SINAMICS G120/G120变频器之间的路由功能?
- 在STEP7项目中配置DP/ AS-i LINK Advanced
- DP Link 和耦合器的 兼容性
- 在IWLAN 产品SCALANCE W及IWLAN/PB Link PNIO上使用C plug 卡时需要注意些什么?


















{{item.nickName}}