

















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
常问问题

 4.0 分
4.0 分
S120扩展抱闸控制
文档编号:F0679|
文档类型:常问问题|
发布时间:2024年01月29日
- 0
- 1812
- 5049
扩展抱闸功能,相对于简单抱闸控制来说,可以实现复杂的抱闸控制,例如用于电机抱闸和运行抱闸。本文详细介绍了如何使用SINAMICS S120变频器的扩展抱闸功能。
扩展抱闸功能,相对于简单抱闸控制来说,可以实现复杂的抱闸控制,例如用于电机抱闸和运行抱闸。扩展抱闸功能具有以下功能:
• 强制打开抱闸 (p0855, p1215)• “强制闭合抱闸” 信号为1时闭合抱闸(p0858)• 用于打开或闭合抱闸的二进制互联输入 (p1218, p1219)• 用于打开或闭合抱闸的阈值的模拟量互联输入 (p1220)• 两个输入之间的 “OR/AND” 模块 (p1279, r1229.10, r1229.11)• 可以控制抱闸和控制工作抱闸。• 监控抱闸的反馈信号 (r1229.4, r1229.5)• 可配置的响应(A07931, A07932)• 在取消信号 “ 转速控制器使能 ” 后闭合抱闸 (p0856)抱闸控制有以下几种方式,顺序按优先级排列:• 参数 p1215• 二进制互联参数 p1219[0...3] 和 p0855• 静止状态检测逻辑的控制指令• 通过模拟量互联,使用阈值判断的控制指令
1 激活扩展抱闸功能(Extended brake control)
1.1使用STARTER激活
首先,离线状态下进行驱动轴的配置(Configuration),如图所示

第二步,在右侧界面选择配置驱动数据组(Configure DDS),如图所示: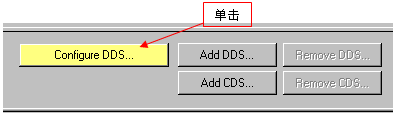
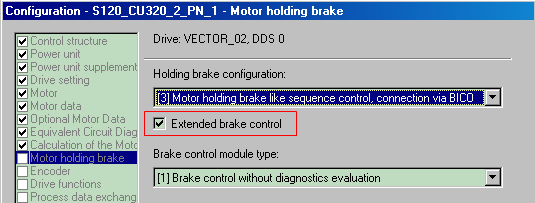
第三步,进入驱动配置界面,在抱闸配置界面中激活扩展抱闸控制(Extended brake control);
第四步,然后保存,在线后下装  (Download CPU / drive unit to target device);
(Download CPU / drive unit to target device);
第五步,确认已激活扩展抱闸功能,查看驱动轴参数r108.14,如图所示:

1.2使用BOP20激活扩展抱闸功能
第一步,修改CU参数p0009=2,
第二步,修改CU参数p0108[1].14=1(假定p0108[1]对应所需的驱动轴),
第三步,修改CU参数p0009=0,装置激活扩展抱闸功能,
第四步,检查驱动轴参数r0108.14=1 。
BOP20的使用请参考以下文档:
http://www.ad.siemens.com.cn/download/docMessage.aspx?ID=2622&loginID=&srno=&sendtime=
1.3 注意事项
• 没有修改出厂设置时,扩展抱闸控制作为 “简单抱闸控制”工作。• 如果书本型电机模块和带 “Safe Brake Relay” 的模块型功率单元检测到已连接抱闸(BR+,BR-之间有阻值),则在自动配置时,简单抱闸控制自动激活(p1215 = 1) ,并自动激活抱闸状态诊断功能(p1278=0)。• 在不具备内部抱闸控制时,可以由参数 (p1215=3) 激活控制。• 只有启用“带诊断分析的抱闸控制”功能,即p1278=0,才能使用安全功能“Safe Brake Control”。• 只有书本型电机模块和带 “Safe Brake Relay” 的模块型功率单元才可以激活抱闸控制监控(p1278=0)。
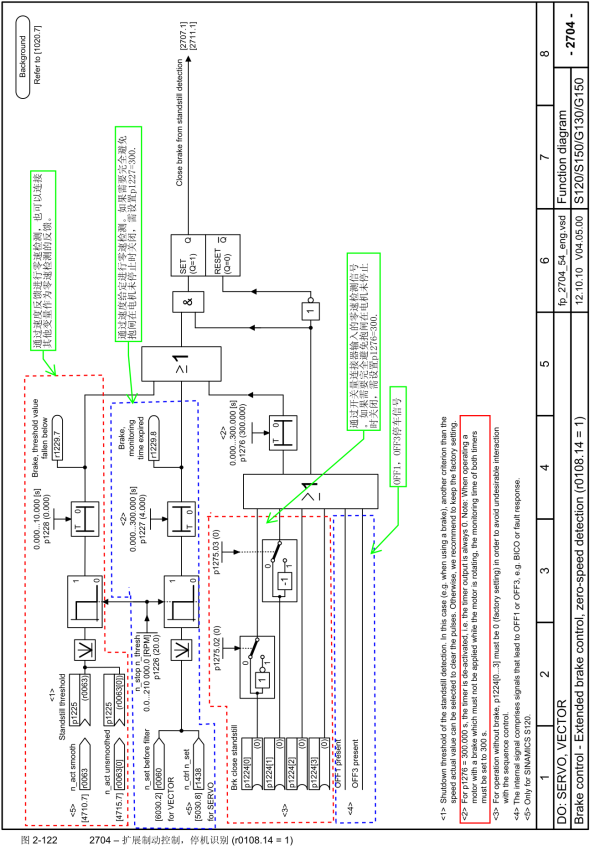
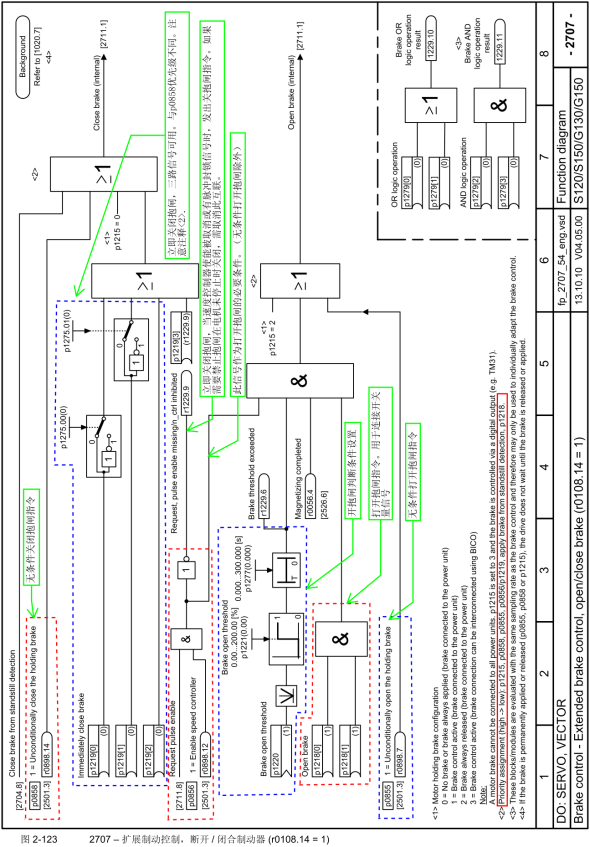
2 功能图
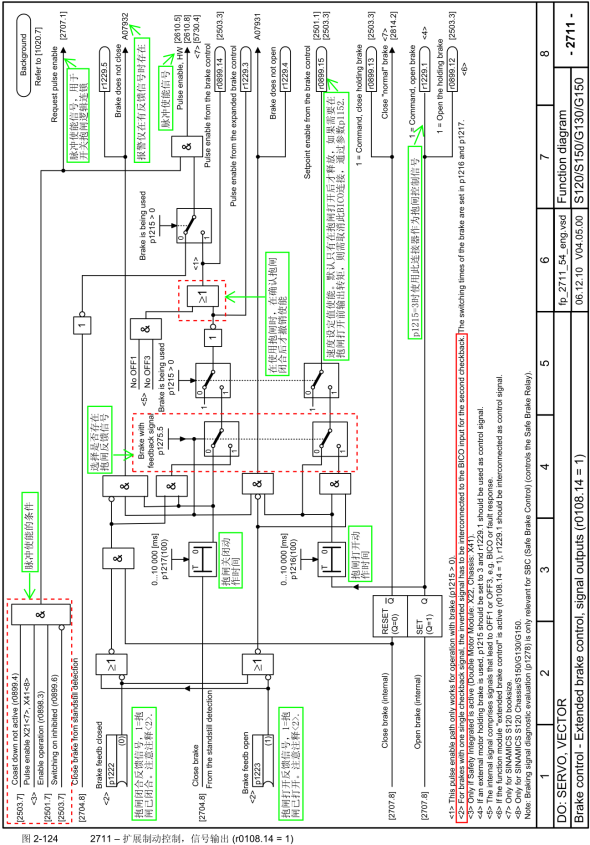
3 使用STARTER配置扩展抱闸功能
打开抱闸界面
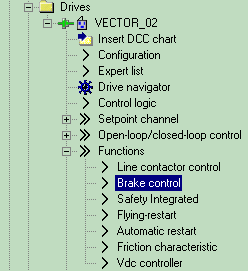
图1 打开抱闸界面
抱闸界面
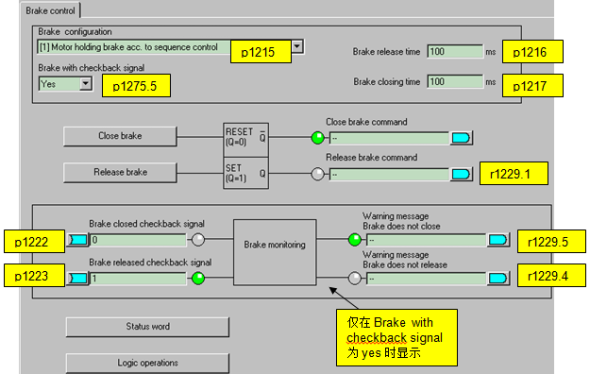
图2 抱闸配置界面
参数设置:
对于参数p1215,可以有以下几种设置方式:
• p1215=0,不使用抱闸功能• p1215=1,基本抱闸控制模块集成的抱闸• p1215=2,电机抱闸一直打开• p1215=3,外部抱闸控制装置,使用BICO连接
p1216:抱闸打开动作时间;
p1217:抱闸关闭动作时间;
p1222:抱闸已闭合反馈信号;
p1223:抱闸已打开反馈信号;
一般地,关闭抱闸和释放抱闸命令使用一个连接器即可,推荐使用连接器r1229.1。
关抱闸设置界面
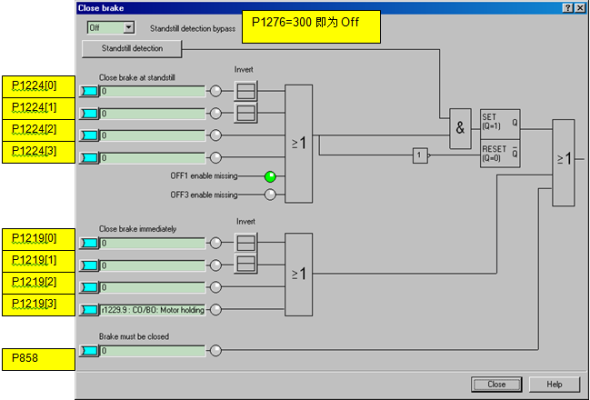
图3 关抱闸设置界面
参数设置:
p1276:电机静止时关闭抱闸信号的延时时间,设置为300s时取消P1224的关抱闸功能;p1224:电机静止时关闭抱闸信号,可由外部开关量连接器控制,p1276=300时无效;p1219:立即关闭抱闸指令;p0858:强制关闭抱闸指令;注意:1. p1219[3]默认设置为r1229.9,即当取消使能时立即发出关抱闸指令,如果需要禁止抱闸在电机未停止时关闭,请取消此互联。2. 各参数的优先级为(从高到低):p1215, p0858, p0855, p0856/p1219, 来自静止状态检测的关抱闸信号, p1218
静止状态检测设置界面
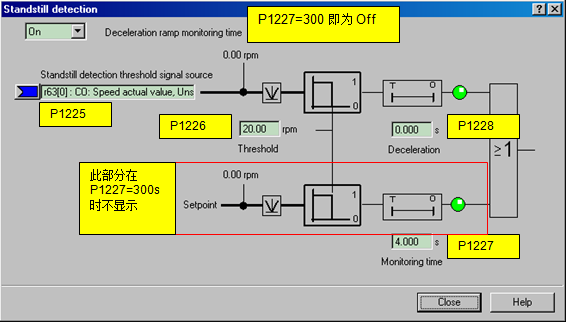
图4 静止状态检测设置界面
参数设置:
p1225:设置静止状态检测的信号源,默认为速度实际值r0063;
p1226:设置检测阈值,默认为20rpm;
p1228:零速检测延时时间,单位为s;
p1227:设置通过速度给定进行零速检测时的时间延时,当设置为300s时,取消此功能;
开抱闸设置界面
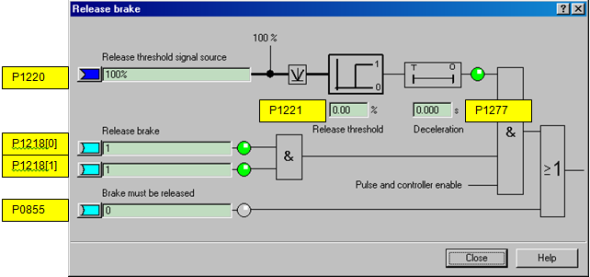
图5 开抱闸设置界面
参数设置:
p1220:设置释放抱闸状态检测的信号源;
p1221:设置检测阈值;
p1277:零速检测延时时间,单位为s;
p1218:连接开抱闸控制信号,可使用外部BICO开关量打开抱闸;
p0855:连接强制打开抱闸信号;
4 示例
1. 电机在带抱闸的情况下启动
通电后,如果希望给出所需使能后,设定值就立即使能,即使抱闸还没有打开(p1152=1) 。此时必须撤销出厂设置p1152=r0899.15。驱动会在抱闸力相反的方向上形成转矩。如果电机转矩或电机电流 (p1220) 超过了阈值1(p1221) ,抱闸便打开。抱闸完全打开的时间长短不一,取决于抱闸的类型和规格。此时应注意,超出制动转矩阈值后,装置进入STOP2状态(r0899.2=0,r0046.21=1),从而使电机电流不超出允许的极限值,或避免产生的电机转矩损坏制动,经过制动打开时间 (p1216) 后恢复。应根据抱闸松开实际需要的时间设置p1216。
2. 紧急制动
在紧急制动情况下需要同时达到电气制动和机械制动。此时可以将OFF3用作紧急制动的触发信号:p1219[0] = r0898.2和p1275.00 = 1(OFF3设置为“立即闭合抱闸 ”,并取反)。应将OFF3减速时间 (p1135) 设为0秒,防止变频器在抱闸闭合时运行。电机抱闸回馈的能量需要反馈回电网或通过制动电阻消耗。
3. 起重机驱动上的运行抱闸
在带手动控制装置的起重机上,驱动必须能够立即对控制杆即主控开关的动作作出响应。此时,设置参数p1276=300s,驱动通过“ON”指令 (p0840) 上电(脉冲已使能)。而转速设定值 (p1142) 和转速控制器 (p0856) 处于锁定状态。电机已激磁,因而省去了交流电机上通常需要的激磁时间,大约1-2秒。现在,在主控开关偏转和电机旋转之间只间隔了抱闸打开时间。一旦主控开关偏转,便发出“来自控制系统的设定值使能”(该位和p1142、 p1279[1]、p1224[0]互联),立即使能转速控制器。在抱闸打开时间 (p1216) 到后,使能转速设定值。主控开关处于零位时,转速设定值被锁定,驱动会沿着斜坡函数发生器的下降斜坡减速,一旦低过静止状态检测阈值(p1226) ,抱闸立即闭合。在抱闸闭合时间 (p1217) 结束后,转速控制器被锁定,现在电机无法旋转。此处使用的是扩展抱闸控制。参数设置如下图所示。
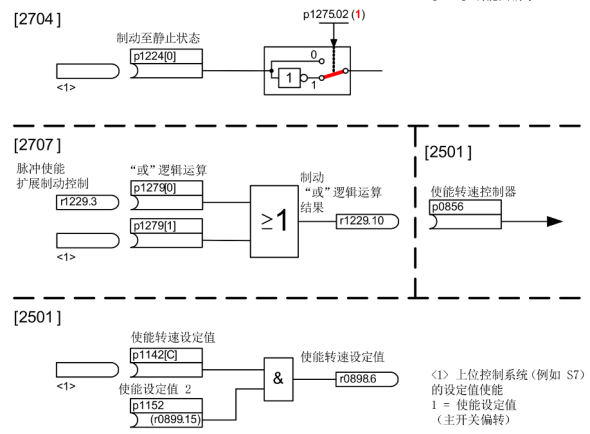
图6 起重机驱动上的运行抱闸
关键词
扩展抱闸 S120 G130 G150

剩余80%未阅读,请登录后下载/查看文档

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错





 关联文档
关联文档
- 在Startdrive中配置S120简单抱闸控制
- 在6SE70中怎样设置抱闸控制?
- 提升应用中的抱闸控制(适用于 SIMOREG DC-Master, 6RA70 和 SINAMICS DCM, 6RA80)
- 在转炉的应用中,如何实现电机转矩、电机电流、输出频率全部到达后开电机抱闸的控制?
- SINAMICS S120:安全集成扩展功能,通过带 PROFIBUS 的 PROFIsafe 激活 CU320 的故障安全驱动
- 怎样为扩展S120通讯报文
- SINAMICS V90:怎样连接并且组态电机抱闸
- SIMOTICS S: 抱闸过早失灵的可能原因
- 通过3SK1扩展故障安全控制器的触点
- SIMOTION D驱动控制单元扩展的几种方式


















{{item.nickName}}