目前的项目需要控制一根钢管做旋转的动作,因为精度要求不高,考虑到成本问题就选择了一款国产的步进电机。
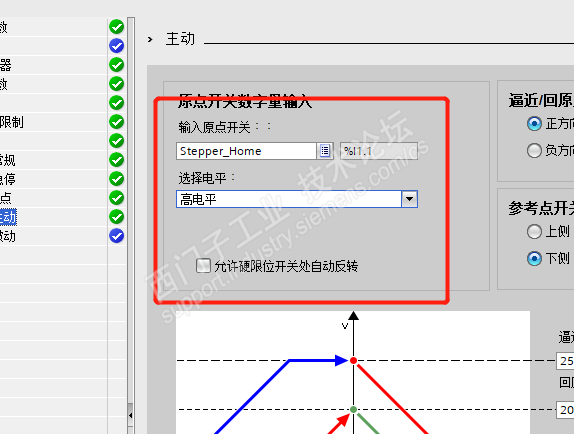
遇到的第一个问题就是配置工艺对象时老报错,8613:虽然未组态硬限位开关,但还是在主动回原点过程中 ,激活了在该硬限位开关处反向。原因是我的电机由于不需要硬件限位,所以在组态中没有配置硬件限位。但是在回原点的配置中,在允许硬限位开关处自动反转的勾选没有取消。并且输入原点开关没有配置。修改了这两项之后,组态正常没有报警了。
第二个问题是在运行了几小时后,发现电机本体过热,热的超出了认知范围,感觉不太正常。后来经过核实发现,是因为厂家推荐的驱动器最小输出电流是3.2A,而推荐的电机的额定电流是2A,所以过热。厂家又顺丰了新的驱动器,第二天一早到了之后继续调试。
第三个问题是,老驱动器的脉冲是24v,而新的驱动器是5v。我用的1200信号板,特意为了配合老驱动器而买的24v脉冲输出。信号板没法换,所以在驱动器脉冲输入引脚上串联了1k电阻。由于没有1k电阻,最后是两个2k并联解决的问题。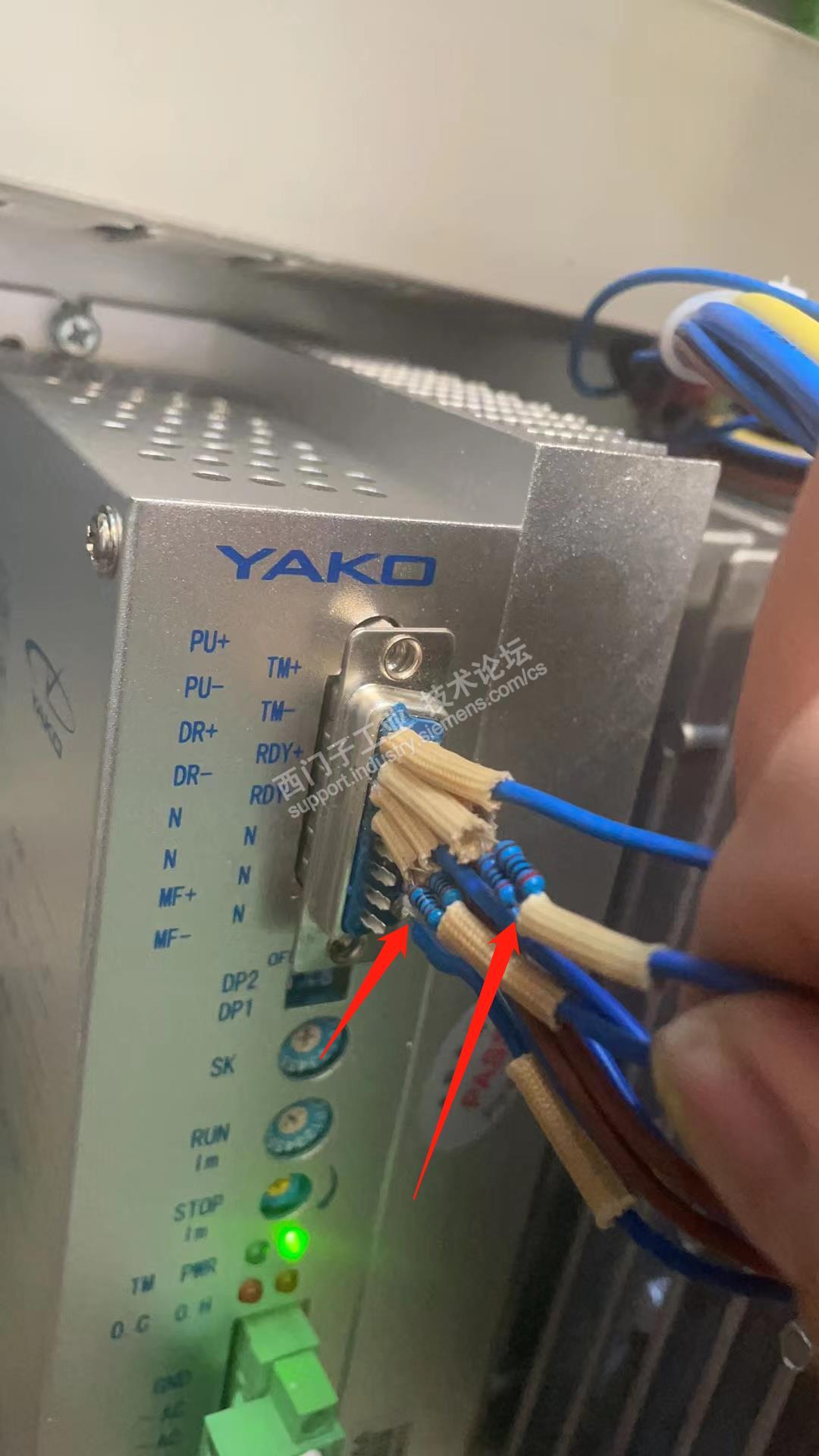
至此,控制上的问题基本都处理完成,实际运行时又发现气缸的气管会发生缠绕,所以无尽的旋转还不行,只能定量旋转之后再回原点,所以程序里改成了绝对方式定位。
最后还有个漏洞,点击没抱闸,假如断电之后,有什么未知的原因造成了电机的旋转,那么我认为的原点就没了,如果这种未知的情况多发生了几次,可能气管还是会发生缠绕,扯坏气缸。所以方案还在优化中。。。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国


 白金
白金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
