


PID整定即PID参数整定。对PID控制器的比例、积分、微分三部分参数进行整定,必须兼顾动态和静态的性能指标要求,合理地选取Kp、Ti、Td三个参数,才能获得良好的控制效果。
PID参数的选取与被控对象和工艺特性关系重大,工程上有许多种PID参数整定方法,它们适用于不同的工艺和对象。本文将采用经验试凑法,在简要说明PID控制器中比例、积分、微分三部作用的基础上,以FB41 "CONT_C"作为PID控制器和FB100 "PROC_C"作为被控对象构成的系统为例,按照先比例、再积分、最后微分的顺序,整定Kp、Ti、Td三个参数。
| 硬件 / 软件 | 订货号 |
| CPU 317-2 PN/DP | 6ES7 317-2EH14-0AB0 |
| MMC | 6ES7 954-8LC03-0AA0 |
STEP 7 Professional V15.1 |
6ES7 822-1AA05-0YA5 |
比例作用可成比例地反映控制系统的偏差,偏差一旦产生,比例部分立即产生控制作用,以减小偏差。偏差为零时,比例控制作用也为零,因此比例作用是基于偏差进行调节的,即为有差调节。
比例作用的强弱与比例系数Kp成正比,Kp越小,比例作用越弱;Kp越大,比例作用越强。增大Kp,比例作用增强,系统动态响应加快,消除误差的能力增强,但超调量变大;减小Kp,比例作用减弱,系统动态响应减慢,但稳定性会有所提高。
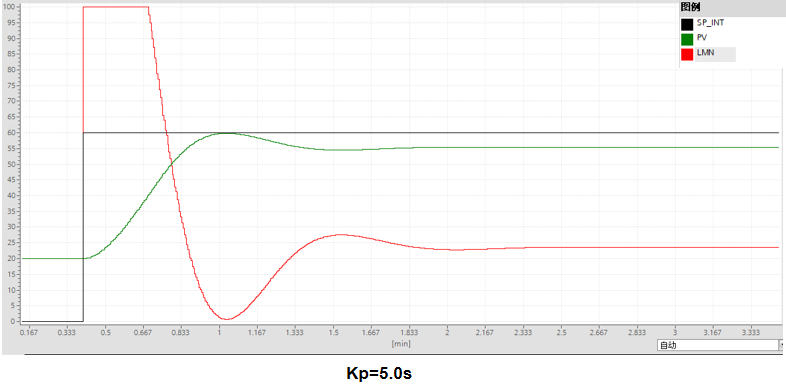
在相同的设定值阶跃变化的情况下,仅启用比例作用,暂不启用积分作用和微分作用,进行调节。对比例系数Kp取不同的数值,以下几张图表明了不同的Kp对应不同的控制效果。
只要偏差存在,积分作用就进行,即对误差进行积分,使输出继续增大或减小,直到偏差为零,积分作用保持不变,达到无差调节的效果。
积分作用的强度与积分时间Ti成反比,Ti越小,积分作用越强;Ti越大,积分作用越弱。减小Ti,积分作用增强,输出变化加快,系统稳定下降,易引起或加剧震荡;增大Ti,积分作用减弱,输出变化减缓,稳定性上升,但稳态时间会随之变长。
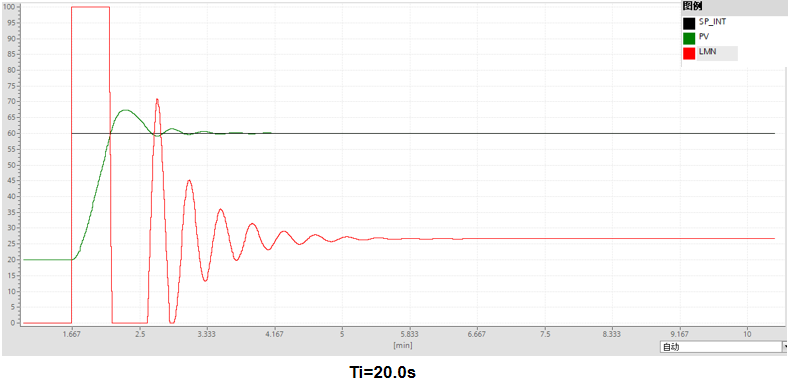
在相同的设定值阶跃变化的情况下,启用比例作用和积分作用,暂不启用微分作用,进行调节。取比例系数Kp=30.0,对积分时间取不同的数值,以下几张图表明了不同的Ti对应不同的控制效果。



比例作用和积分作用均是在偏差信号产生后去进行调节以消除偏差,而微分作用可以反映系统偏差信号的变化率,即在偏差出现之前,产生超前的控制效果。对于具有滞后特性的被控对象,可加入微分环节。
微分作用的强度与微分时间Td成正比,Td越大,微分作用越强;Td越小,微分作用越弱。增大Td,微分作用增强,系统动态响应加快,系统达到稳态所需的时间缩短,但易出现系统震荡,稳定性下降。
在相同的设定值阶跃变化的情况下,启用比例、积分和微分作用,进行PID调节。取比例系数Kp=30.0,积分时间Ti=20.0s,对微分时间取不同的数值,以下几张图表明了不同的Td对应不同的控制效果。


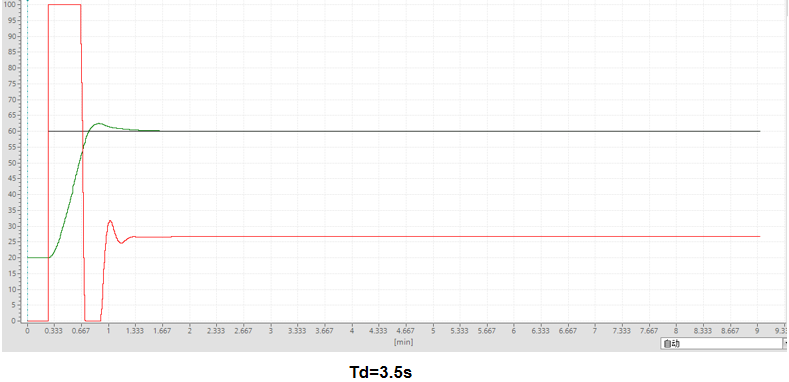

根据以上步骤,本次PID参数整定结果为:Kp=30.0,Ti=20.0s,Td=5.0s
本例程仅供参考,程序中的CPU版本、类型可能与用户实际使用不同,用户可能需要先对例子程序做修改和调整,才能将其用于测试。本例程的作者和拥有者对于该例程的功能性和兼容性不负任何责任,使用该例程的风险完全由用户自行承担。由于它是免费的,所以不提供任何担保,错误纠正和热线支持,用户不必为此联系西门子技术支持与服务部门。