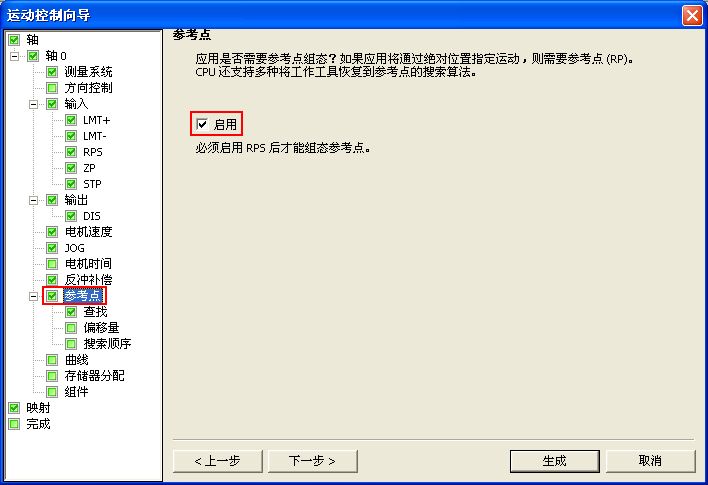
图 1. 使能寻找参考点位置

图 2.设置寻找参考点参
a.定义快速寻找速度“RP_FAST”(快速寻找速度是模块执行RP寻找命令的初始速度,通常RP_FAST是MAX_SPEED的2/3左右);
b.定义慢速寻找速度“RP_SLOW”(慢速寻找速度是接近RP的最终速度,通常使用一个较慢的速度去接近RP以免错过,RP_SLOW的典型值为SS_SPEED);
c.定义初始寻找方向“RP_SEEK_DIR”(初始寻找方向是RP寻找操作的初始方向。通常,这个方向是从工作区到RP附近。限位开关在确定RP的寻找区域时扮演重要角色。当执行RP寻找操作时,遇到限位开关会引起方向反转,使寻找能够继续下去,默认方向=反向);
d.定义最终参考点接近方向“RP_APPR_DIR”,(最终参考点接近方向是为了减小反冲和提供更高的精度,应该按照从RP移动到工作区所使用的方向来接近参考点,默认方向=正向)。

图 3.设置参考点偏移量

图 4.设置寻找参考点顺序
S7-200 SMART 提供4中寻找参考点顺序模式,每种模式定义如下:
RP寻找模式1:将 RP 定位在靠近工作区一侧的 RPS 输入开始激活的位置;
RP寻找模式2:将 RP 定位在 RPS 输入的激活区域的中心;
RP寻找模式3:将 RP 定位在 RPS 输入的激活区域外的指定数量的零脉冲 (ZP) 处;
RP寻找模式4:将 RP 定位在 RPS 输入的激活区域内的指定数量的零脉冲 (ZP) 处。
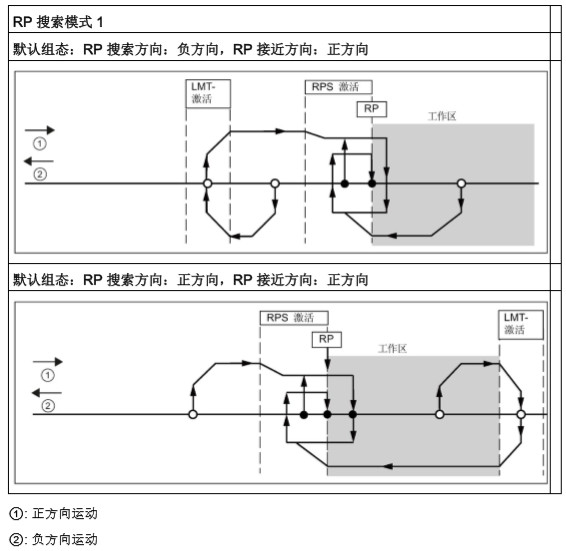
图 5.RP搜索模式1
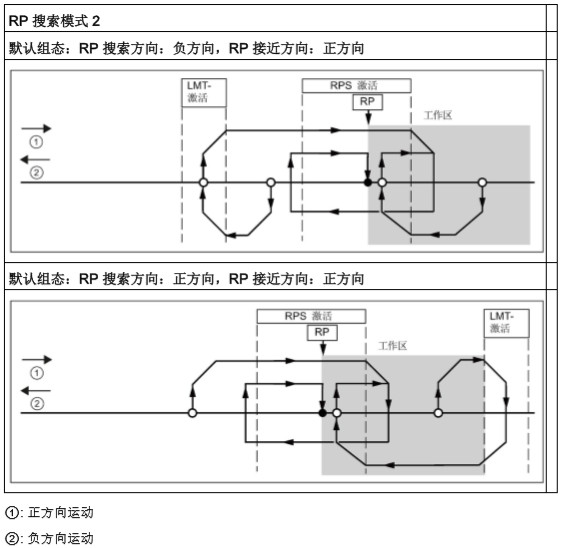
图 6.RP搜索模式2
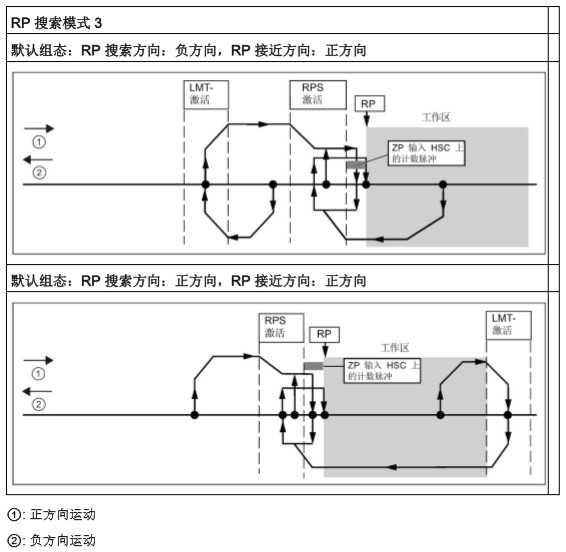
图 7.RP搜索模式3
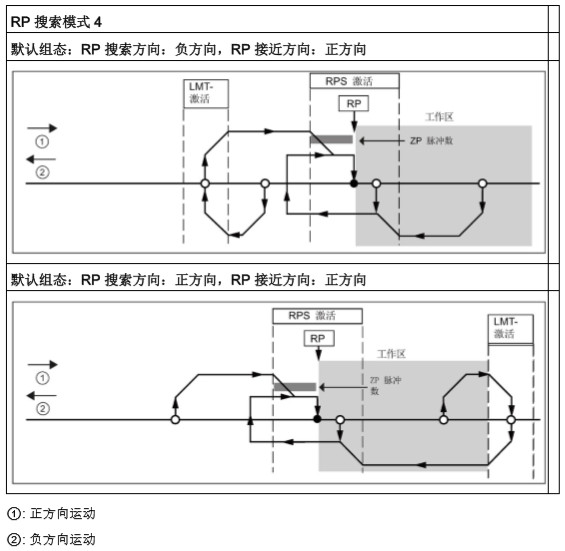
图 8.RP搜索模式4

图 9.回原点指令
关于寻找参考点模式的详细信息请参考: