从STEP 7-Micro/WIN SMART V2.4 和 S7-200 SMART PLC(固件版本 V2.4)开始增加了 PROFINET通信的功能,通过PROFINET接口可与V90 PN伺服驱动器进行通信连接进行速度控制,此接口可支持八个连接(IO 设备或驱动器)。实现的方法主要有以下两种:
1. V90使用1号标准报文,PLC通过调试软件中提供的SINAMICS库功能块SINA_SPEED对V90PN进行速度控制。
2. V90使用1号标准报文,不使用任何专用程序块,利用报文的控制字和状态字通过编程进行控制,使用这种方式需要对报文结构比较熟悉。
需要安装的软件:
• STEP 7-Micro/WIN SMART V2.4 调试软件
• STEP 7 Micro/WIN V2.4 SINAMIC control 库更新工具
https://support.industry.siemens.com/cs/cn/en/view/109766118/zh
• SINAMICS V-ASSISTANT 软件
V90 PN配置要点
• 设置控制模式为"速度控制(S)"
• 配置标准通信报文1(P922=1)
• V90在线后点击"设置PROFINET->配置网络",设置V90的IP地址及设备名称:注意:设置的设备名称一定要与200 SMART项目中配置的相同。
参数保存后需重启驱动器才能生效。
方法一 使用标准报文1和SINA_SPEED功能块
V90 PN与PLC采用PROFINET RT通信方式并使用报文1,项目步骤如下:
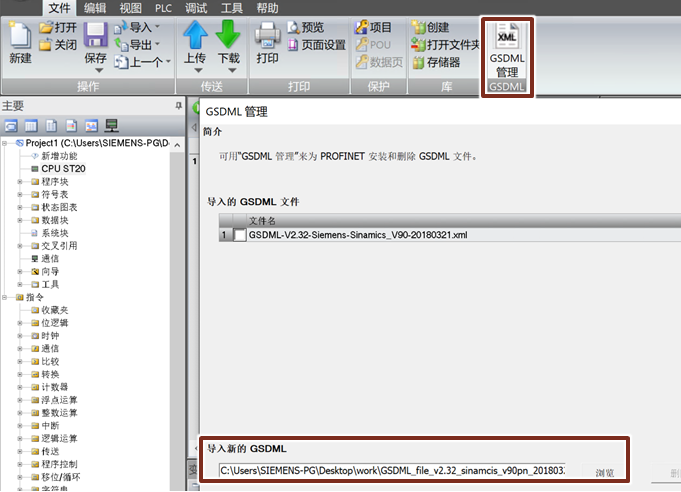
1. 创建项目后,安装V90 PN的GSD文件。V90GSD文件下载链接如下:
https://support.industry.siemens.com/cs/ww/en/view/109737269
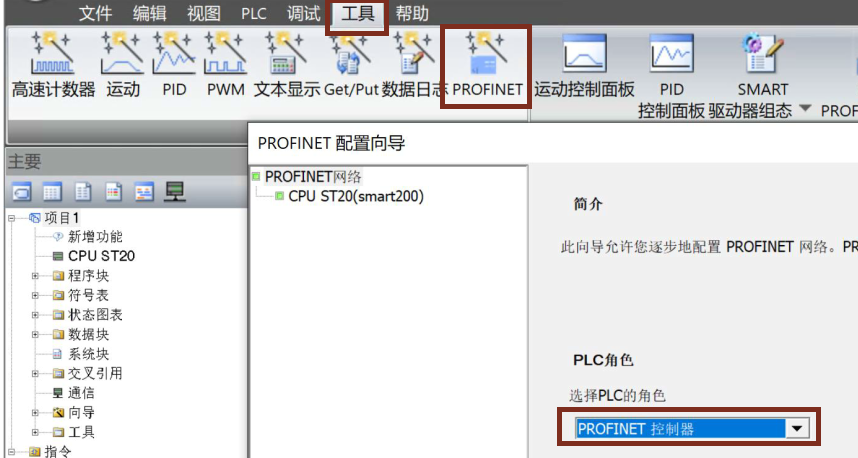
2. 选择PLC为PROFINET控制器
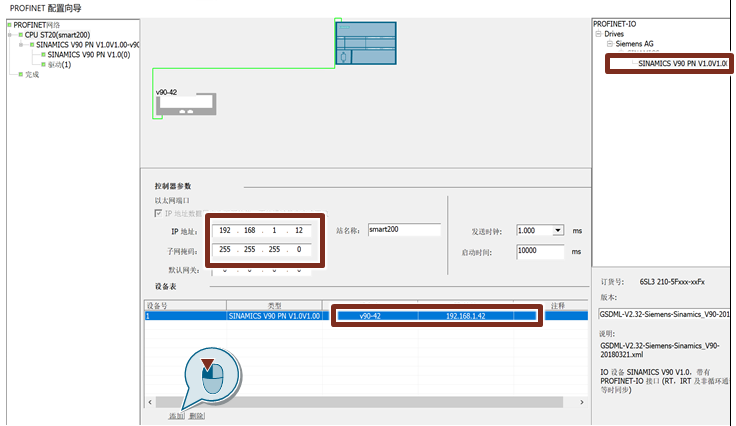
3. 设置PLC的IP地址,并且添加V90 PN驱动器,设置驱动器IP地址和设备名称
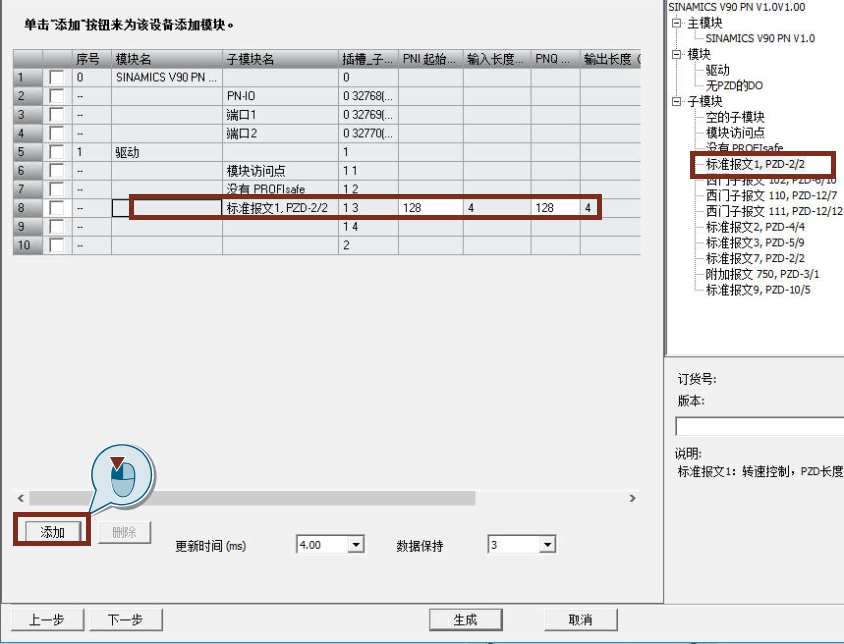
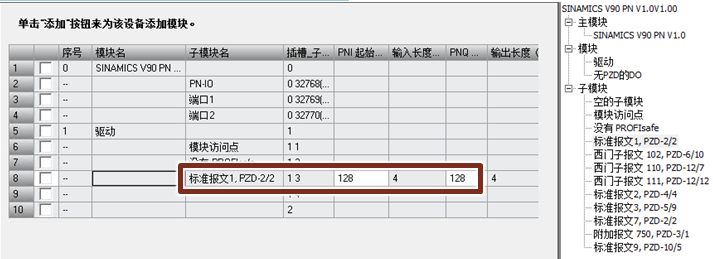
4. 在配置报文的视图中添加标准报文1到模块列表中,最小的更新时间为4 ms
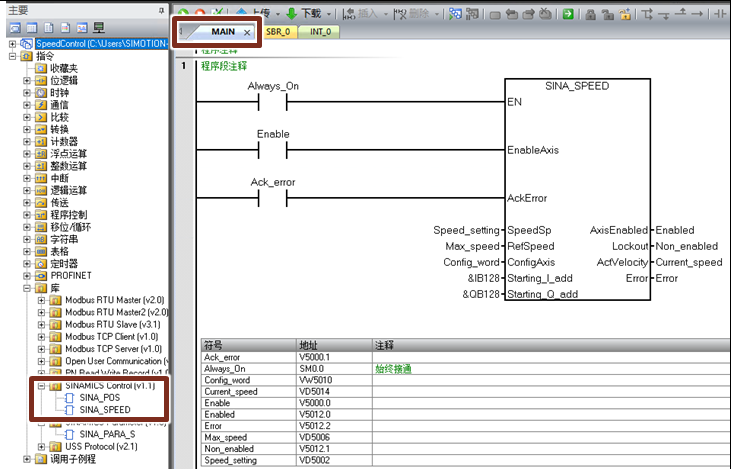
5. 编写程序,注意St_I_add和St_Q_add的地址必须和报文1的IO地址对应
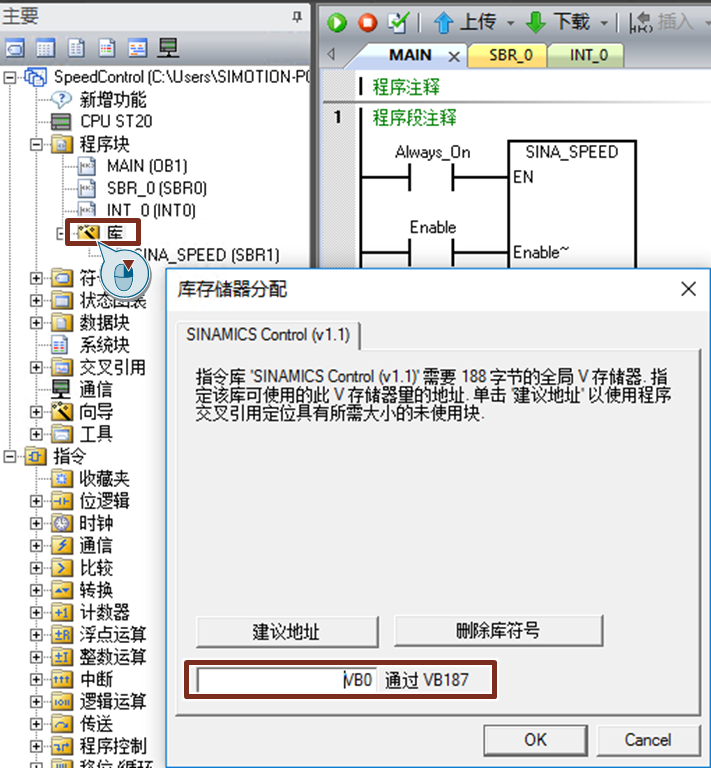
6. 分配程序库使用的V地址区
7. SINA_SPEED功能块输入输出参数说明
输入参数:
| 输入信号 | 类型 | 含义 |
|---|---|---|
| EnableAxis | BOOL | =1,驱动使能 |
| AckError | BOOL | 驱动故障应答 |
| SpeedSp | REAL | 转速设定值[rpm] |
| RefSpeed | REAL | 驱动的参考转速[rpm],对应于驱动器中的p2000参数 |
| ConfigAxis | WORD | 默认设置为16#003F,说明参看下表 |
| Starting_I_add | DWORD | V90 PN I 存储区起始地址的指针 |
| Starting_Q_add | DWORD | V90 PN Q 存储区起始地址的指针 |
ConfigAxis的各位说明:
| 位 | 默认值 | 含义 |
|---|---|---|
| 位0 | 1 | OFF2 |
| 位1 | 1 | OFF3 |
| 位2 | 1 | 驱动器使能 |
| 位3 | 1 | 使能/禁止斜坡函数发生器使能 |
| 位4 | 1 | 继续/冻结斜坡函数发生器使能 |
| 位5 | 1 | 转速设定值使能 |
| 位6 | 0 | 速度设定值反向 |
| 位7 | 0 | 打开抱闸 |
| 位8 | 0 | 电动电位计升速 |
| 位9 | 0 | 电动电位计降速 |
输出参数:
| 输出信号 | 类型 | 含义 |
|---|---|---|
| AxisEnabled | BOOL | 驱动已使能 |
| LockOut | BOOL | 驱动处于禁止接通状态 |
| ActVelocity | REAL | 实际速度[rpm] |
| Error | BOOL | 1=存在错误 |
方法二 PLC通过IO地址直接控制V90 PN
此种控制方式无需专用的程序块,直接给定速度。V90使用标准报文1,项目及网络配置步骤与方法一相同。通过对输出的第一个控制字进行驱动器的起停控制、第二个控制字可以指定电机运行的速度。
V90对应的输出地址可从设备视图中查看:
在主程序中调用MOV_W命令,发送对驱动的控制字及速度给定:
1. 通过第一个控制字进行驱动器的起停控制(16#047E->16#047F)
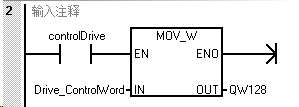
2. 通过第二个控制字可以指定电机运行的速度(十六进制16#4000,即十进制的16384对应 p2000 速度参数值)
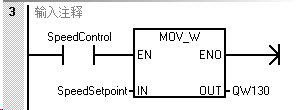
例如,V90 PN的p2000=3000rpm,如果SpeedSetpoint设置为十进制的8192(即十六进制的16#2000),则表示速度给定为1500rpm。
![]() S7-200 SMART可以控制几个V90 PN?
S7-200 SMART可以控制几个V90 PN?
在不挂其他PROFINET设备下,最多可以控制8个V90 PN。
![]() 给控制命令不运行有哪些原因?
给控制命令不运行有哪些原因?
• 检查V90驱动器是否有故障信息,消除故障
• 检查ConfigAxis 输入是否是16#3F
• EnableAxis需要上升沿触发且保持